
不同海水营养盐现场连续观测系统的比较研究*
|
王丽芳(1976—), 女, 浙江省金华市人, 硕士, 主要研究方向为海洋化学 |
Copy editor: 林强
收稿日期: 2020-08-04
要求修回日期: 2020-09-13
网络出版日期: 2020-09-20
基金资助
国家自然科学基金(41876080)
版权
Comparison of different continuous in-situ observation systems in seawater
Copy editor: LIN Qiang
Received date: 2020-08-04
Request revised date: 2020-09-13
Online published: 2020-09-20
Supported by
National Natural Science Foundation of China(41876080)
Copyright
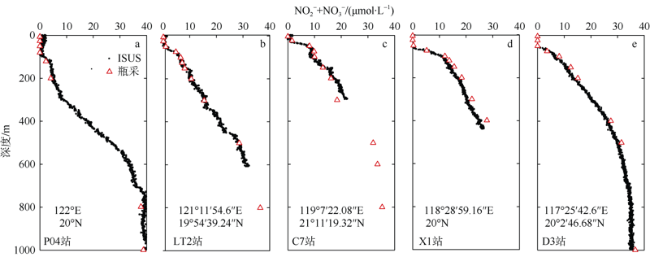
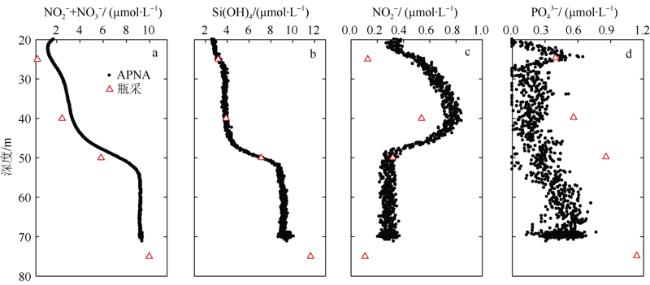
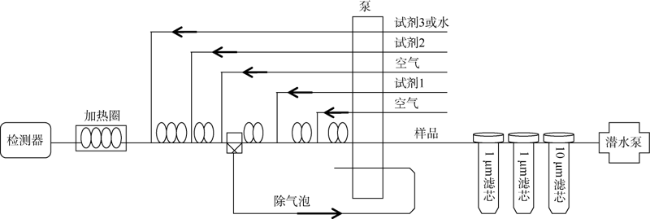
海水营养盐自动观测技术是海洋观测技术的核心之一, 也是世界各国海洋观测技术发展的重点。本文概述了海水营养盐自动观测技术在海洋环境监测中的研究进展, 并基于航次的现场实践, 比较了海水营养盐自动观测设备的应用情况, 归纳了不同设备的优缺点。基于紫外光谱法的硝酸盐传感器(in-situ ultraviolet spectroscopy, ISUS)具有不需化学试剂、响应速度快、适合连续长期观测、耐压深度深的优点, 可广泛应用于海水和淡水环境的走航观测、现场剖面观测和浮标定点观测; 其缺点是测定参数少、灵敏度低。基于湿化学法的营养盐剖面自动分析仪(Autonomous Profiling Nutreint Analyzer, APNA)与连续流动在线分析仪(型号为QuAAtro)具有测定精度和准确度高、多营养盐参数同步测定的优点, 可用于浅水剖面和短时间连续观测, 但存在操作复杂、工作时间短、试剂用量大的缺点, 不适合长期时间序列或深水观测; APNA能进行原位观测, QuAAtro基于船载, 需要加载样品采集过滤系统。本研究基于以上实践与经验, 进一步探讨了现有海水营养盐自动观测技术目前所面临的技术瓶颈及未来发展趋势, 旨在为海洋现场自动监测仪器的选用提供参考。
王丽芳 , 黄韬 , 杜川军 , 郭香会 . 不同海水营养盐现场连续观测系统的比较研究*[J]. 热带海洋学报, 2021 , 40(3) : 103 -113 . DOI: 10.11978/2020087
As an important part of automatic marine observation, autonomous instrument of nutrients in seawater is a focus of marine observation in the world. In this paper, we summarize research progresses of autonomous instruments for marine nutrient monitoring, according to different continuous in-situ observation systems for nutrients, and evaluate these systems. Nitrate sensors based on UV/Vis spectroscopy are widely used in underway-pumping, vertically profiling and buoy observations with the advantage of chemical reagent free, quicker response and longer duration; but these sensors have fewer parameters monitored and are lower in sensitivity. The Autonomous Profiling Nutrient Analyzer (APNA) nutrient profiling analyzers and QuAAtro continuous flow analyzer are based on “wet chemistry”, and are widely used in shallow water profiling and short time series observations, with the advantages of higher analytical precision and accuracy, and multi-nutrient parameters. However, their disadvantages include complicated operation, larger reagent consumption, and short duration; they are not suitable for long-term and deep-water observations. APNA can be used for in-situ observation. QuAAtro is shipboard based and requires additional sampling and filtration system. Technical bottlenecks and future development direction of autonomous instruments for nutrients are then discussed, which will provide a guidance for the selection of automatic observation instruments in marine environmental observation.
图1 珠江口NO2-+NO3-的平面分布图a. ISUS与AA3测定比较; b. AA3测量数据(每个点代表一个站位), 单位: μmol·L-1; c. 校正后的ISUS走航观测数据 Fig. 1 Distribution of NO2-+NO3- in the Pearl River Estuary a. comparison with measurements of AA3 and ISUS; b. result of AA3 observation (each dot represents one station), units: μmol·L-1; c. result of corrected ISUS observation |
表1 不同营养盐在线观测方法的比对Tab. 1 Comparison of in-situ observation methods of nutrients |
| ISUS硝酸盐传器 | APNA营养盐剖面分析仪 | QuAAtro流动分析仪 | |
|---|---|---|---|
| 原理 | 紫外光谱法 | 湿化学法(CFA+光度法) | 湿化学法(SFA+光度法) |
| 试剂需求 | 无 | 需要 | 需要 |
| 测量参数 | NO3- | NO3-、Si(OH)4、PO43-、NO2- | NO3-、Si(OH)4、PO43-、NO2- |
| 测量范围/(μmol·L-1) | 0.5~2000 | NO3-、Si(OH)4: 0.05~50 PO43-、NO2-: 0.02~11 | NO2-: 0.1~80; Si(OH)4: 0.16~160; PO43-: 0.08~30; NO2-: 0.04~40 |
| 测量精度 | ±2μmol·L-1 或读数的±10% | 2%~5% | 2% |
| 耐压深度/m | 0~1000 | 0~200 | - |
| 数据采集频率/Hz | 1 | 1 | >60 |
| 最大持续时间 | >1个月 | <1个月 | <1个月 |
| [1] |
杜军兰, 邹常胜, 袁钟才, 等, 2003. 海水营养盐现场自动分析技术[J]. 海洋技术, 22(3):37-42.
|
| [2] |
方涛, 冯志华, 高磊, 2012. 长江口南支水域营养盐和叶绿素a的潮周期变化[J]. 海洋湖沼通报, (3):58-65.
|
| [3] |
郭翠莲, 张述伟, 程永强, 等, 2018. 海水五参数原位营养盐分析仪的研制[J]. 山东科学, 31(2):1-8.
|
| [4] |
李丹, 冯巍巍, 陈令新, 等, 2016. 一种基于紫外光谱法的海水硝酸盐在线监测系统[J]. 光谱学与光谱分析, 36(2):442-444.
|
| [5] |
李晖, 杜军兰, 哈谦, 等, 2018. 船载海洋水质自动监测系统研制和应用[J]. 环境影响评价, 40(6):67-70.
|
| [6] |
马然, 曹煊, 刘岩, 等, 2016. 基于微流控技术的营养盐原位分析方法的研究[J]. 传感技术学报, 29(11):1659-1665.
|
| [7] |
潘俊, 于非, 任强, 等, 2017. 基于光学传感器在南黄海硝酸盐调查中的使用初探[J]. 海洋科学, 41(12):9-16.
|
| [8] |
潘明祥, 张正斌, 王肇鼎, 等, 2000. 大亚湾海水微表层生物-化学研究Ⅱ. (二)生物-化学特性的周日变化规律[J]. 热带海洋, 19(2):57-63.
|
| [9] |
綦声波, 任军博, 马然, 等, 2019. 基于分光光度法的多量程海水营养盐原位传感器检测系统设计[J]. 海洋科学, 43(11):76-83.
|
| [10] |
孙兆华, 曹文熙, 赵俊, 等, 2008. 基于长光程技术的痕量海水营养盐自动分析仪的设计与测试[J]. 光谱学与光谱分析, 28(12):3000-3003.
|
| [11] |
肖靖泽, 赵萍, 魏月仙, 等, 2011. 五参数全自动营养盐分析仪的研制与应用[J]. 现代科学仪器,(1): 63-65, 68.
|
| [12] |
邹常胜, 2001. 海水营养盐现场监测[J]. 海洋技术, 20(4):33-37.
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}