
福建海雾的CALIOP遥感监测及基于Himawari-8的云下雾光谱特征分析*
|
胡晨悦(1998—), 女, 安徽省马鞍山人, 硕士研究生, 从事海雾遥感检测研究。email: |
|
*感谢福建省气象局气象科学研究所提供数据支撑。 |
Copy editor: 姚衍桃
收稿日期: 2022-10-09
修回日期: 2022-12-14
网络出版日期: 2022-12-19
基金资助
国家自然科学基金(41976165)
CALIOP remote sensing monitoring of the Fujian sea fog and spectral characteristics analysis of subcloud fog based on Himawari-8
Copy editor: YAO Yantao
Received date: 2022-10-09
Revised date: 2022-12-14
Online published: 2022-12-19
Supported by
National Natural Science Foundation of China(41976165)
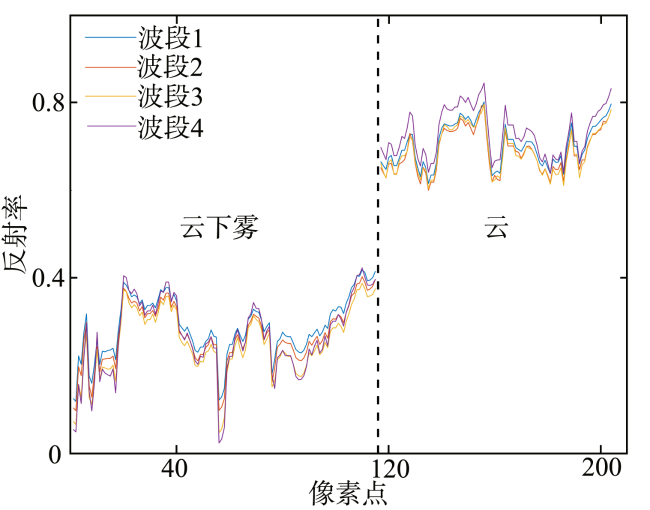
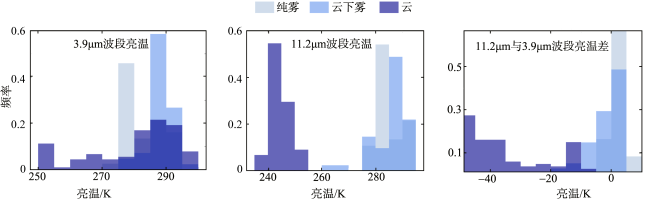
海雾是一种影响海上运输与军事活动的灾害性天气, 福建沿海作为我国海雾多发的区域, 同时也是国家战略重地, 对此地区开展海雾监测研究至关重要。带偏振的云气溶胶探测激光雷达(cloud-aerosol lidar with orthogonal polarization, CALIOP)利用激光探测, 具有垂直穿透能力, 可探测云雾的垂向结构特征, 非常适合用于海雾监测。本文首先通过CALIOP L1级532nm总衰减后向散射和大气垂直特征分类标识(vertical feature mask, VFM)数据, 开展福建海雾遥感监测, 基于海雾物理特征, 扩大海雾检测范围。同时分析了福建海雾的垂向特征, 发现云下雾事件多发。为探究云下雾光谱特征, 发展高时间覆盖及大范围同步海雾监测算法, 本文基于Himawari-8数据对比了云、纯雾、云下雾三者的光谱差异。结果表明, 白天时段纯雾与云下雾在各波段的光谱特征均无明显差别, 且1—4波段的反射率远低于云像元; 夜间, 纯雾在3.9μm波段的亮温普遍低于云下雾。基于上述光谱特征差异进行云、纯雾和云下雾的区分, 有望提高福建海雾监测的精度。
胡晨悦 , 丘仲锋 , 廖廓 , 赵冬至 , 吴到懋 . 福建海雾的CALIOP遥感监测及基于Himawari-8的云下雾光谱特征分析*[J]. 热带海洋学报, 2023 , 42(4) : 104 -112 . DOI: 10.11978/2022215
Sea fog, as a hazard weather, affects maritime transportation and military activities. The coastal area of Fujian province is a national strategic area characterized by frequent sea fog. It is essential to monitor and study the sea fog in this area. cloud-aerosol lidar with orthogonal polarization (CALIOP) can detect the vertical structure characteristics of sea fog due to its vertical penetration through laser. Thus, it is very suitable for sea fog monitoring. In this paper, firstly, remote sensing monitoring of sea fog over the coastal area of Fujian was carried out through CALIOP L1 level 532 nm total attenuated backscattering and vertical feature mask (VFM) data. Based on the physical characteristics of sea fog, the detection range of sea fog was expanded. Secondly, the vertical characteristics of sea fog in this area were analyzed and it was found that subcloud fog occurred frequently. To explore the spectral characteristics of the subcloud fog and develop a high time coverage and large-scale synchronous sea fog monitoring algorithm. Besides, the spectral differences of cloud, pure fog, and subcloud fog were compared based on Himawari-8 data. According to the results, in the daytime, the spectral characteristics of pure fog and subcloud fog were not significantly different in each band, and the reflectance of bands 1~4 was much lower than that of cloud pixels; at night, the brightness temperature of pure fog at 3.9 μm band was generally lower than that of subcloud fog. It is expected to improve the monitoring accuracy of sea fog in Fujian Province by distinguishing cloud, pure fog, and subcloud fog based on the above spectral characteristics.
Key words: sea fog; satellite remote sensing; Fujian
表1 L1数据不同高度范围的分辨率Tab. 1 Resolution of different altitude ranges for L1 data |
| 高度范围/km | 网格点序号 | 水平分辨率/km | 532nm垂直分辨率/m | 1064nm垂直分辨率/m | 高度区域 |
|---|---|---|---|---|---|
| 30.1~40.0 | 1~33 | 5 | 300 | N/A | 5 |
| 20.2~30.1 | 34~88 | 53 | 180 | 180 | 4 |
| 8.3~20.2 | 89~288 | 1 | 60 | 60 | 3 |
| -0.5~8.3 | 289~578 | 1/3 | 30 | 60 | 2 |
| -2.0~-0.5 | 579~583 | 1/3 | 300 | 300 | 1 |
注: N/A表示不适用(not applicable) |
表2 VFM数据不同高度范围的分辨率Tab. 2 Resolution of different altitude ranges for VFM data |
| 高度范围/km | 垂向分辨率/m | 水平分辨率/m | 每5km剖面数/条 | 剖面格点数/个 | |
|---|---|---|---|---|---|
| 底部 | 顶部 | ||||
| -0.5 | 82 | 30 | 333 | 15 | 290 |
| 82 | 20.2 | 60 | 1000 | 5 | 200 |
| 20.2 | 30.1 | 180 | 1667 | 3 | 55 |
| 网格点总数/个 | 545 | ||||
图2 2020年5月9日532nm后向散射图(3km以下)红框中为后向散射较低区域 Fig. 2 532 nm backscatter pattern (below 3 km), May 9, 2020. The lower backscatter region is shown in red box |
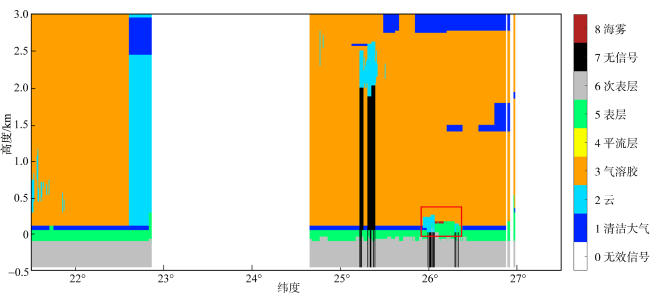
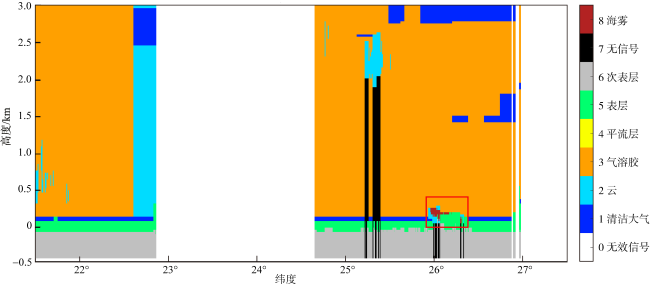
图3 本文改进算法后获得的2020年5月9日的VFM图(3km以下)红框中为海雾点 Fig. 3 Diagram of VFM using improved algorithm on May 9, 2020 (below 3 km). The red box shows the sea fog |
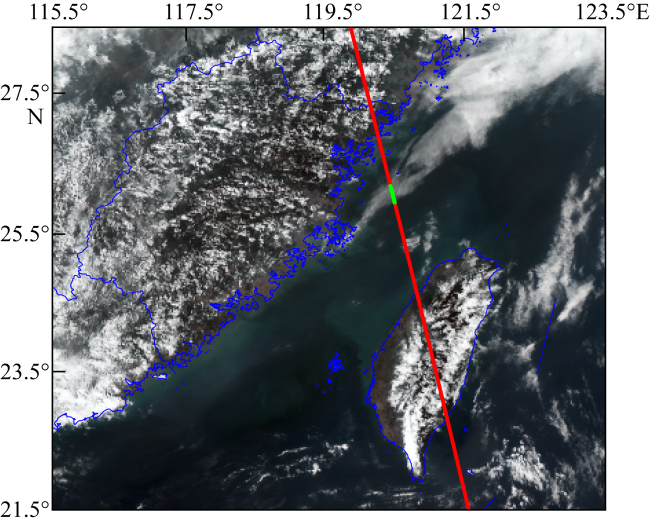
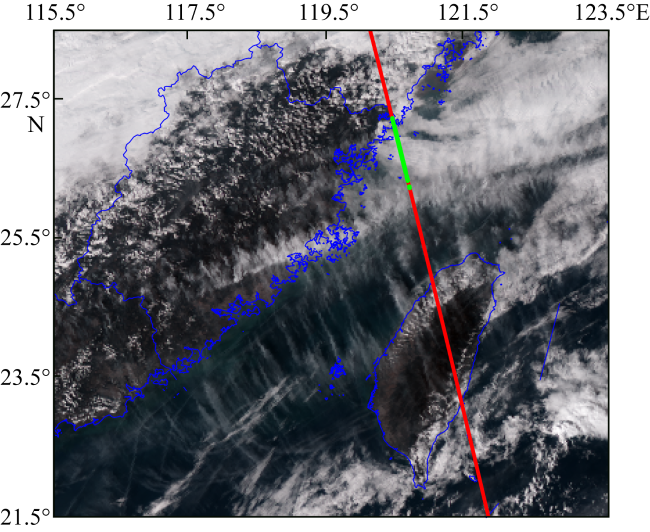
图4 2020年5月9日Himawari-8真彩图叠加CALIOP海雾检测结果该图基于国家测绘地理信息局标准地图服务网站下载的审图号为GS(2022)4307号的标准地图制作, 底图无修改。图中红线为CALIOP轨迹, 绿点为海雾点 Fig. 4 Diagram of the true color map of Himawari-8 superimposed with the sea fog detection result based on CALIOP on 9 May, 2020. The red line is the footprint of CALIOP and the green points show the sea fog |
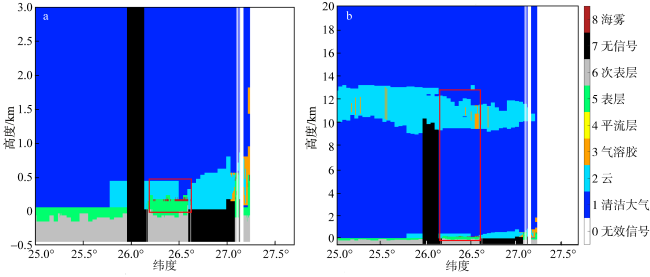
图5 2018年12月04日的VFM图a. 高度为3km; b. 高度为20km。红框中为云下雾 Fig. 5 Diagram of VFM on December 04, 2018. (a) Height less than 3 km; (b) height less than 20 km. The red box shows the subcloud fog |
图6 2018年12月04日Himawari-8真彩图叠加CALIOP海雾检测结果。该图基于国家测绘地理信息局标准地图服务网站下载的审图号为GS(2022)4307号的标准地图制作, 底图无修改。红线为CALIOP轨迹, 绿点为海雾点 Fig. 6 Diagram of the true color image of Himawari-8 superimposed with the sea fog detection result based on CALIOP on December 4, 2018. The red line is the footprint of CALIOP and the green points show the sea fog |
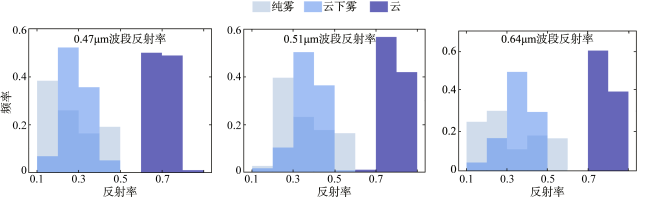
图7 白天云下雾、纯雾与云在Himawari-8可见光波段的反射率对比Fig. 7 Comparison of reflectance of subcloud, pure fog and cloud in the visible band of Himawari-8 during daytime |
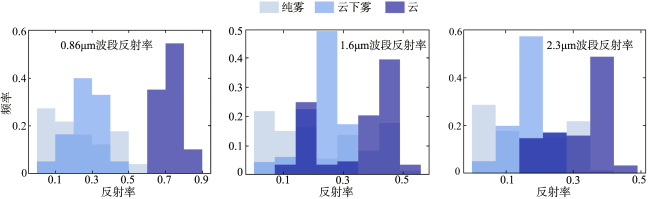
图8 白天云下雾、纯雾与云在Himawari-8近红外波段的反射率对比Fig. 8 Comparison of reflectance of subcloud, pure fog and cloud in the near infrared band of Himawari-8 during daytime |
| [1] |
郝姝馨, 郝增周, 黄海清, 等, 2021. 基于Himawari-8数据的夜间海雾识别[J]. 海洋学报, 43(11): 166-180.
|
| [2] |
李琦, 蔡淼, 周毓荃, 等, 2021. 基于探空云识别方法的云垂直结构分布特征[J]. 大气科学, 45(6): 1161-1172.
|
| [3] |
李昀英, 王汉杰, 2000. 台湾海峡地区雾形成的天气类型分析[J]. 热带海洋, (4): 65-70.
|
| [4] |
刘柏鑫, 李栋梁, 2018. 我国云量时空变化特征及其与副热带夏季风北边缘带关系研究[J]. 气象, 44(3): 382-395.
|
| [5] |
刘少军, 吴胜安, 李伟光, 等, 2017. 基于 FY-3B 卫星资料的中国南海海区 1-3 月海雾时空分布特征研究[J]. 海洋气象学报, 37(4): 85-90.
|
| [6] |
马静, 于芸, 魏立新, 2012. 东海近海海雾日变化特征及生成的水文气象条件分析[J]. 海洋预报, 29(6): 58-65.
|
| [7] |
孙艺, 杨悦, 甄晴, 2020. CALIPSO卫星资料的春夏季黄海海雾高度特征分析[J]. 海洋预报, 37(3): 54-61.
|
| [8] |
田永杰, 2016. 基于风云 2 号静止卫星数据的白天海雾监测算法研究[D]. 广州: 华南理工大学.
|
| [9] |
张春桂, 蔡义勇, 张加春, 2009. MODIS 遥感数据在我国台湾海峡海雾监测中的应用[J]. 应用气象学报, 20(1): 8-16.
|
| [10] |
张春桂, 何金德, 马治国, 2013. 福建沿海海雾的卫星遥感监测[J]. 中国农业气象, 34(3): 366-373.
|
| [11] |
张春桂, 林炳青, 2018. 基于 FY-2E 卫星数据的福建沿海海雾遥感监测[J]. 国土资源遥感, 30(1): 7-13.
|
| [12] |
张苏平, 鲍献文, 2018. 近十年中国海雾研究进展[J]. 中国海洋大学学报(自然科学版), 38(3): 359-366.
|
| [13] |
赵耀天, 吴东, 2020. CALIOP、CPR 数据在探测海雾中的应用[J]. 中国海洋大学学报(自然科学版), 50(10): 125-133.
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}