
走航式海洋观测平台设计及其初步应用*
作者简介:孙兆华(1979—), 男, 内蒙古乌海市人, 博士, 主要从事海洋技术研究。E-mail: joeysun@scsio.ac.cn
收稿日期: 2018-01-04
要求修回日期: 2018-03-25
网络出版日期: 2018-10-13
基金资助
国家自然科学基金青年科学基金项目(41406205)
国家海洋公益性行业科研专项(201305019)
中国科学院南海海洋研究所所拨特聘研究员项目(Y4SL021001)
广东省科技计划项目(2017B010118004)
Design and application of ship-borne marine-monitoring platform
Received date: 2018-01-04
Request revised date: 2018-03-25
Online published: 2018-10-13
Supported by
Young Scientists Fund of the National Natural Science Foundation of China (41406205)
Welfare Project of the Oceanic Administration (201305019)
Project of South China Sea Institute of Oceanology, Chinese Academy of Sciences (Y4SL021001)
Science and Technology Planning Project of Guangdong Province of China(2017B010118004)
Copyright
孙兆华 , 曹文熙 , 黄健龙 , 周璇 , 李晓伟 , 邹国旺 . 走航式海洋观测平台设计及其初步应用*[J]. 热带海洋学报, 2018 , 37(5) : 13 -19 . DOI: 10.11978/2018005
The lack of ocean observation data is a bottleneck, which limits our capability to study and explore oceans. We designed a fully-automatic marine-monitoring platform with the remote-telemetry function, which also can auto-obtain ship-borne long time series marine monitoring data. We tested the fully-automatic marine-monitoring platform two times in coastal water and open ocean, which was stable, reliable and compatible according to the data analyzed. The data showed relevant parameters’ changes and revealed mechanisms of relevant ocean events and processes. We expect to popularize the platform on ferries, fishing boats/ships and other non-scientific ships, which utilize existing routes and ship-borne observation method to obtain cost-effective and real-time big data on both wide spatial scale and long time series. Based on the present marine technology, it is a new technical solution to the problems of lacking oceanographic data.
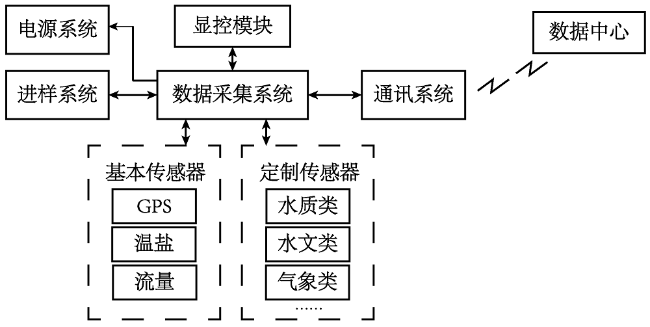
Fig. 1 Block diagram of the ship-borne marine- monitoring platform图1 走航式海洋观测平台原理框图 |
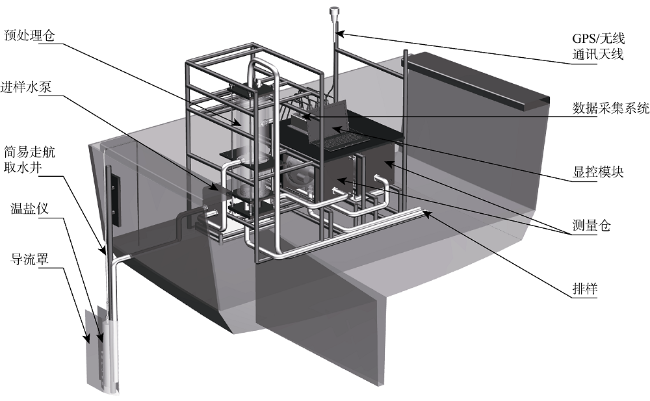
Fig. 2 Ship-borne marine-monitoring platform图2 走航式海洋观测平台结构设计示意图 |
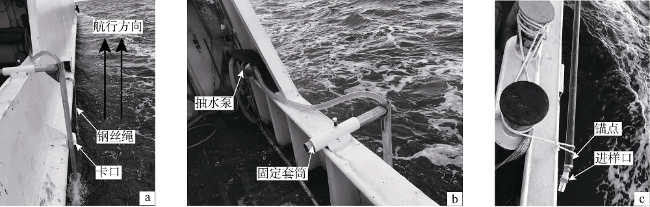
Fig. 3 Simple sampling devices. (a) Side view of the sampling device during cruise; (b) top view of the sampling device during cruise; and (c) devices fixed on the side of the ship during non- cruise图3 简易走航取水井实物照片 |
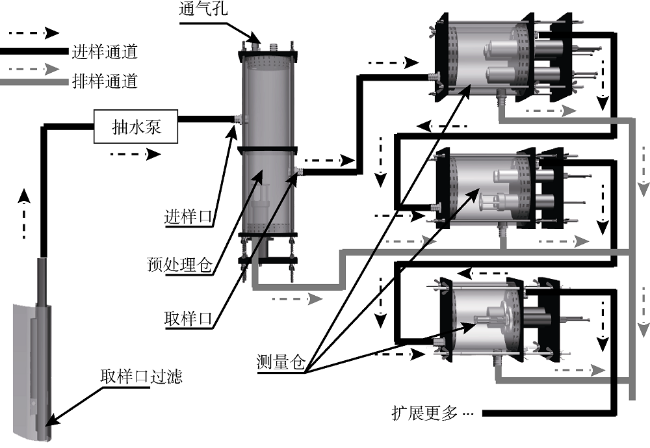
Fig. 4 Sample flow direction of the sampling system图4 进样系统水样流向示意图 |
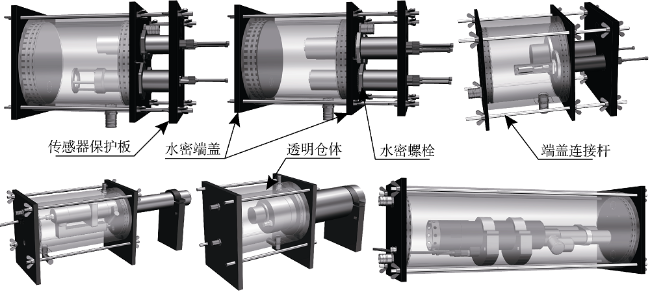
Fig. 5 Structure diagram showing different types of measurement warehouse图5 不同类型测量仓的结构示意图 |
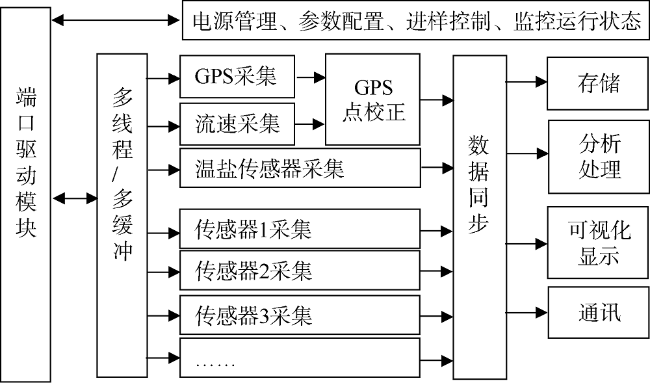
Fig. 6 Block diagram for data acquisition system software图6 数据采集系统软件原理框图 |
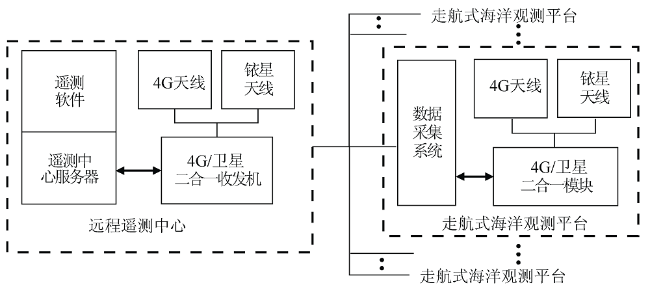
Fig. 7 Block diagram for remote-telemetry system图7 远程遥测系统原理框图 |
Fig. 8 Daya Bay Test and Mariana Trench Test. (a) Offshore ship-borne test photo; (b) offshore sailing track; (c) open-sea ship-borne test photo; d. open-sea sailing track图8 大亚湾试验和马里亚纳海沟试验 |
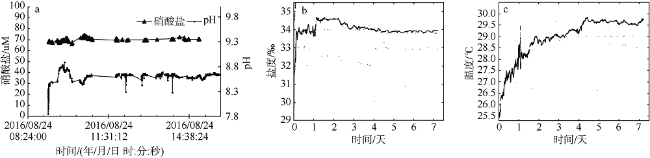
Fig. 9 Data collected. a) Part of nitrate and pH data obtained from offshore sailing; b) first seven days of salinity data obtained from an open-sea sailing; c) first seven days of temperature data obtained from an open-sea sailing图9 数据结果 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
上海海洋科技研究中心(
Shanghai Center of Marine Science & Technology (
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}