
一种基于表面状态参数的三维海洋动力学模型数值求解方法*
|
李自立(1979—), 男, 广西桂林人, 副教授, 博士研究生,现从事海洋雷达信号的研究以及教学工作。E-mail: zlienishi@ mailbox.gxnu.edu.cn |
Copy editor: 孙淑杰
收稿日期: 2019-03-20
要求修回日期: 2019-05-22
网络出版日期: 2020-01-09
基金资助
国家自然科学基金项目(61661009)
版权
A numerical method for solving the three-dimensional ocean dynamics model based on surface state parameters
Received date: 2019-03-20
Request revised date: 2019-05-22
Online published: 2020-01-09
Supported by
National Natural Science Foundation of China(61661009)
Copyright
李自立 , 刘奥琦 , 莫旭涛 . 一种基于表面状态参数的三维海洋动力学模型数值求解方法*[J]. 热带海洋学报, 2020 , 39(1) : 12 -19 . DOI: 10.11978/2019029
The real-time motion state of large-scale surface ocean can be obtained by remote sensing technology, while the motion state of the interior ocean can only be obtained by the fixed point observation, which cannot achieve the real-time monitoring of a large area. Based on the basic principles of ocean dynamics, we construct a relationship model between ocean surface and internal motion state in three-dimensional space under the barotropic shallow water continental shelf model. Based on the data of ocean surface velocity and direction detected by remote sensing, combining with the state parameters of wave height and speed, we use the finite difference method to obtain the information of speed and direction of the undercurrent. The inversion results conform to the law of ocean dynamics, reflect the overall distribution of the undercurrent and expand the application range of radar remote sensing.
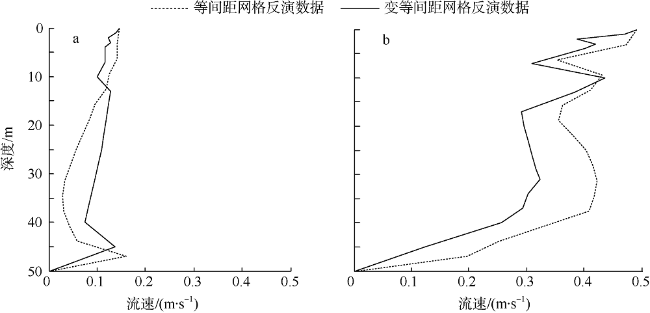
图1 两种网格模型下的速度反演曲线a. 13:00时刻的速度反演; b. 16:00时刻的速度反演 Fig. 1 Inversion curves of velocity under the two grid models. a) Inversion of velocity at 13:00; b) inversion of velocity at 16:00 |
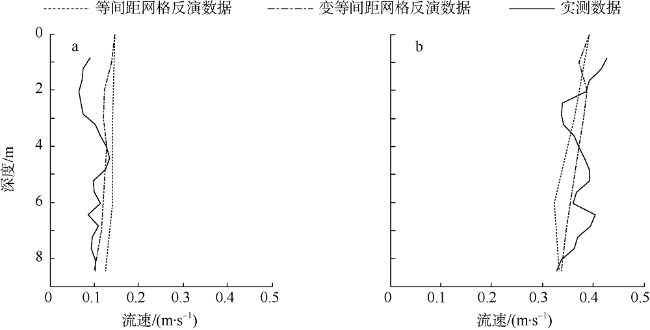
图3 两种网格模型下反演与实测流速对比曲线a. 13:00时刻的流速对比; b. 16:00时刻的流速对比 Fig. 3 Comparison curves of the inversion velocity and the measured velocity under the two grid models. a) Velocity comparison at 13:00; b) velocity comparison at 16:00 |
| [1] |
李自立, 曹红燕, 贾春洋 , 2016. 北部湾海面基于地波雷达观测“天兔”台风风场[J]. 热带海洋学报, 35(4):31-34.
|
| [2] |
文必洋, 李自立, 周浩 , 等, 2009. 便携式高频地波雷达东海表面流探测试验[J]. 电子学报, 37(12):2778-2782.
|
| [3] |
许婷, 曹永港 , 2017. 南海海洋环流季节变化的数值模拟研究[J]. 海岸工程, 36(1):62-71.
|
| [4] |
徐肇廷, 姚凤朝, 隋红波 , 2001. 分层海洋中运动物体生成的内波[J]. 青岛海洋大学学报, 31(4):461-466.
|
| [5] |
郑洋洋, 王惠群, 管卫兵 , 等, 2017. 2001年春季东中国海三维环流的数值模拟[J]. 海洋学研究, 35(4):1-13.
|
| [6] |
朱怀鑫, 俎婷婷, 李健 , 等, 2018. 基于高频地波雷达观测的粤西近海潮流潮能分析[J]. 热带海洋学报, 37(5):25-32.
|
| [7] |
朱小明 , 2018. 基于多光谱遥感图像信息的水质污染监测研究[J]. 计算机技术与发展, 28(11):52-55, 60.
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}