
一种新型水下声学浮标在目标探测中的应用
|
王超(1988—), 男, 山东省章丘市人, 博士研究生, 主要从事水声信号处理和水下无人平台应用研究。email: |
Copy editor: 殷波
收稿日期: 2020-05-08
要求修回日期: 2020-07-22
网络出版日期: 2020-07-29
基金资助
国家重点研发计划(2019YFC0311700)
版权
Application of a new type of underwater acoustic buoy in target detection
Copy editor: YIN Bo
Received date: 2020-05-08
Request revised date: 2020-07-22
Online published: 2020-07-29
Supported by
National Key Research and Development Project(2019YFC0311700)
Copyright
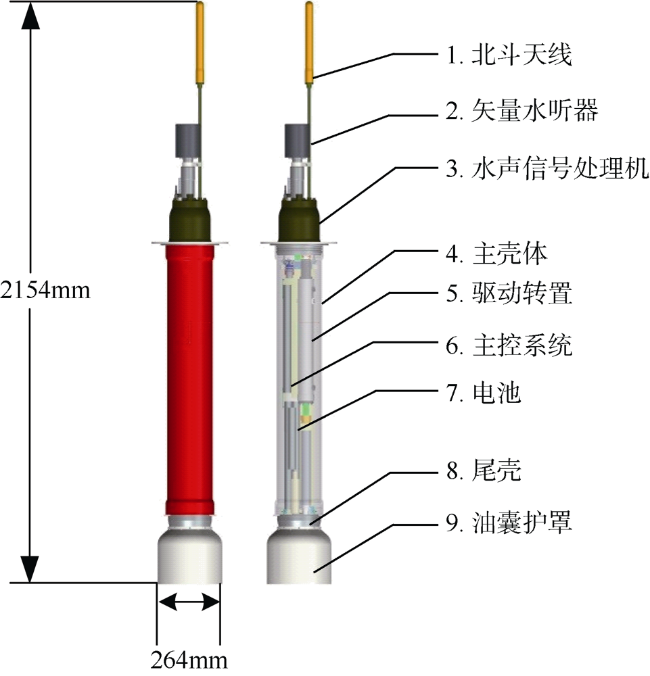
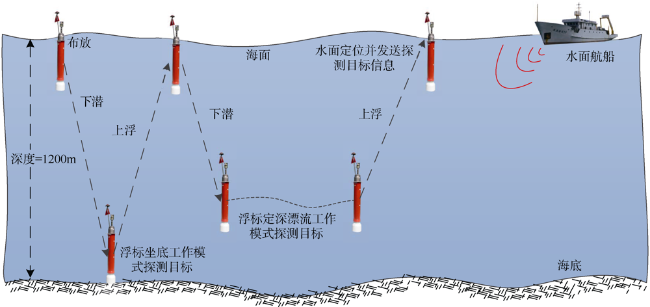
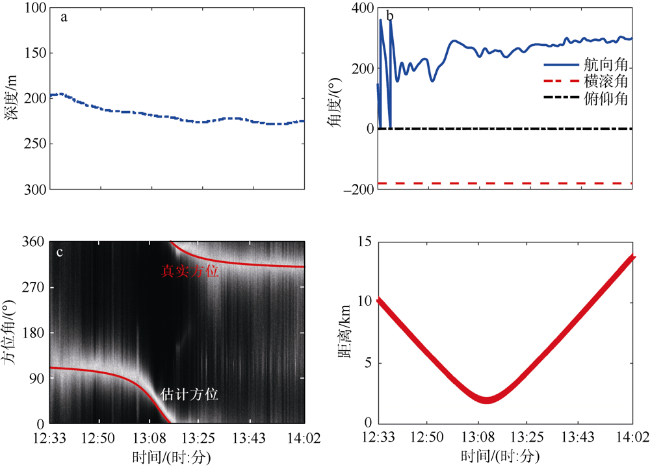
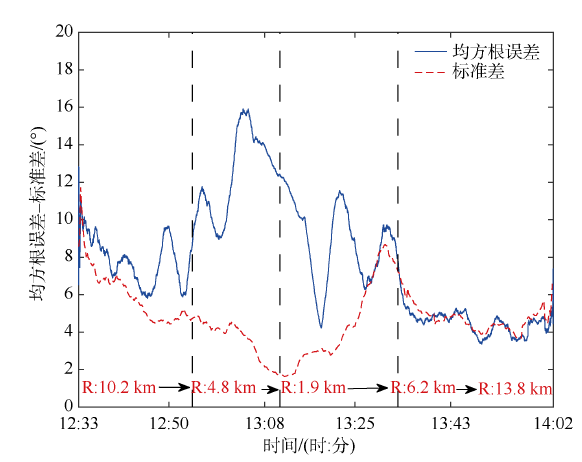
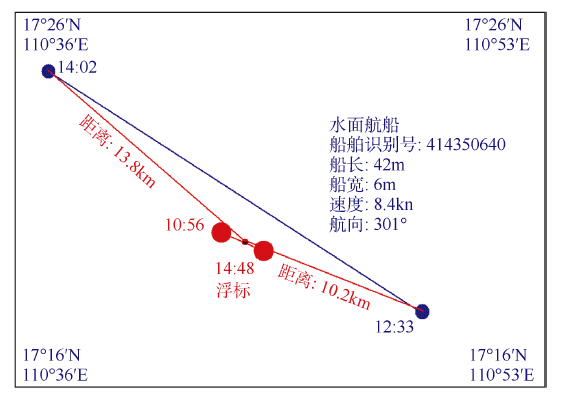
针对海上目标探测问题, 将矢量水听器和Argo浮标相结合, 可构建一种具有水中目标探测能力的新型水下声学浮标平台。该浮标平台可多次上浮和下潜, 具有在位时间长、隐蔽性能高、成本低等特点, 单台水下声学浮标即可实现海上目标探测, 利用多台水下声学浮标可快速形成大面积区域覆盖能力。为进一步验证水下声学浮标对海上目标探测性能, 2019年8月在南海海区开展了多台水下声学浮标海上试验, 数据处理结果表明: 南海夏季典型声速剖面下, 水下声学浮标对船长42m航速8.4kn的水面航船目标最远探测距离可达13.8km, 目标估计方位均方根误差最优可达5°, 在水面航船距离最近的1.9km处, 目标估计方位标准差可达2°。
王超 , 韩梅 , 孙芹东 , 张小川 . 一种新型水下声学浮标在目标探测中的应用[J]. 热带海洋学报, 2021 , 40(2) : 130 -138 . DOI: 10.11978/2020045
A new type of underwater acoustic buoy platform with target detection capability has been developed by combining vector hydrophone with profile buoys. The acoustic buoy can achieve multiple floating and diving, and has the characteristics of long in-position time, high concealing performance and low cost. The use of multiple underwater acoustic buoys can quickly form a large area coverage. To verify the underwater acoustic buoy’s detection performance on ocean targets, a large scale underwater acoustic buoy platform trial was carried out in the South China Sea in August 2019. The results are as follows: under the typical sound velocity profile of the South China Sea, the acoustic buoy has a maximum detection distance of 13.8 km to the surface vessel with a length of 42 m and a speed of 8.4 kn. The root mean square error (RMSE) of target estimated azimuth can reach 5°, and the standard deviation will be up to 2° when the distance between the acoustic buoy and surface vessel is less than 1.9 km.
Key words: vector hydrophone; target detection; acoustic buoy; South China Sea
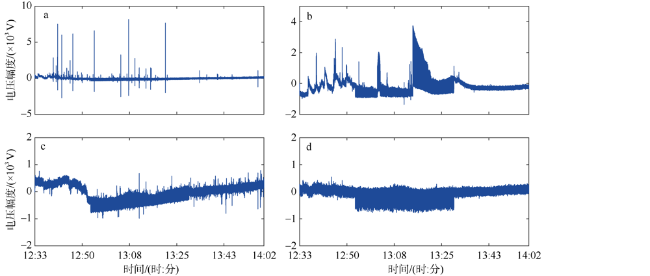
图8 时域信号随时间变化a. P通道; b. Vx通道; c. Vy通道; d. Vz通道 Fig. 8 The original signal change with time (a) P channel, (b) Vx channel, (c) Vy channel, and (d) Vz channel |
图9 不同频率噪声谱级随时间变化a. P通道; b.Vx通道; c. Vy通道; d. Vz通道。R表示浮标与航船之间的距离; 箭头表示距离变化; 垂直虚线表示距离分隔线 Fig. 9 Spectral level change with time at different frequencies (a) P channel, (b) Vx channel, (c) Vy channel, and (d) Vz channel |
| [1] |
陈鹿, 潘彬彬, 曹正良, 等, 2017. 自动剖面浮标研究现状及展望[J]. 海洋技术学报, 36(2):1-9.
|
| [2] |
方尔正, 崔凯, 2005. 基于矢量水听器的一种时间方位历程目标跟踪方法[J]. 应用声学, 24(5):311-316.
|
| [3] |
李峰, 2013. 自主水下航行器目标跟踪方法研究[D]. 哈尔滨: 哈尔滨工程大学.
|
| [4] |
李峥, 李宇, 黄勇, 等, 2012. 水下目标自主连续跟踪与定位算法研究[J]. 仪器仪表学报, 33(3):520-528.
|
| [5] |
梁国龙, 张锴, 付进, 等, 2011. 单矢量水听器的高分辨方位估计应用研究[J]. 兵工学报, 32(8):986-990.
|
| [6] |
刘璐, 兰世泉, 肖灵, 等, 2017. 基于水下滑翔机的海洋环境噪声测量系统[J]. 应用声学, 36(4):370-376.
|
| [7] |
路振, 2013. 无人智能潜器水下目标探测跟踪技术研究[D]. 哈尔滨: 哈尔滨工程大学.
|
| [8] |
沈新蕊, 王延辉, 杨绍琼, 等, 2018. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 26(2):89-106.
|
| [9] |
宋德枢, 梁国龙, 王燕, 2014. 机动目标DOA跟踪粒子滤波算法[J]. 信号处理, 30(7):861-866.
|
| [10] |
孙芹东, 笪良龙, 侯文姝, 等, 2015. 一种新型姿态实时修正矢量水听器的设计[J]. 声学技术, 34(2):304-307.
|
| [11] |
孙芹东, 侯文姝, 王文龙, 等, 2016. 同振式三轴向矢量水听器设计与实现[J]. 传感技术学报, 29(6):952-956.
|
| [12] |
王超, 孙芹东, 兰世泉, 等, 2018. 水下声学滑翔机目标探测性能南海试验分析[J]. 声学技术, 37(6):149-150.
|
| [13] |
王超, 孙芹东, 张林, 等, 2019. 南中国海“G-Argo”声学浮标目标探测能力分析[J]. 应用声学, 38(6):1025-1032.
|
| [14] |
王文龙, 王超, 韩梅, 等, 2019. 矢量水听器在水下滑翔机上的应用研究[J]. 兵工学报, 40(12):2580-2586.
|
| [15] |
吴艳群, 胡永明, 2010. 基于单矢量水听器的水面目标运动分析[J]. 声学技术, 29(4):361-364.
|
| [16] |
杨燕, 孙秀军, 王延辉, 2015. 浅海型水下滑翔机技术研究现状分析[J]. 海洋技术学报, 34(4):7-14.
|
| [17] |
尹云龙, 杨明, 杨绍琼, 等, 2019. 基于水下滑翔机的海洋声学背景场观测技术[J]. 水下无人系统学报, 27(5):555-561.
|
| [18] |
袁华, 严必虎, 2016. 水下滑翔机在水声探测体系中的运用研究[J]. 现代防御技术, 44(1):128-133.
|
| [19] |
周宏坤, 2016. 航空声纳浮标用矢量水听器及其悬挂技术研究[D]. 哈尔滨: 哈尔滨工程大学.
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}