
深海微生物原位自动序列培养装置的研发与试验
|
董自珍(1997—), 男, 江苏省连云港市人, 硕士研究生, 从事海洋装备的研究与应用。email: |
Copy editor: 殷波
收稿日期: 2023-11-03
修回日期: 2023-12-11
网络出版日期: 2023-12-25
基金资助
海南省科技计划三亚崖州湾科技城科技创新联合项目(2021CXLH0015)
Development and testing of a deep-sea microorganism Ocean Automatic Series Incubation System
Received date: 2023-11-03
Revised date: 2023-12-11
Online published: 2023-12-25
Supported by
Hainan Provincial Joint Project of Sanya Yazhou Bay Science and Technology City(2021CXLH0015)
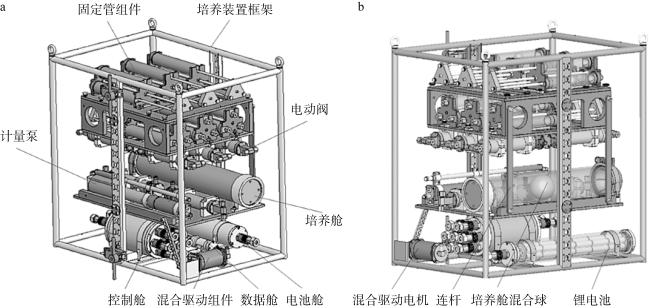
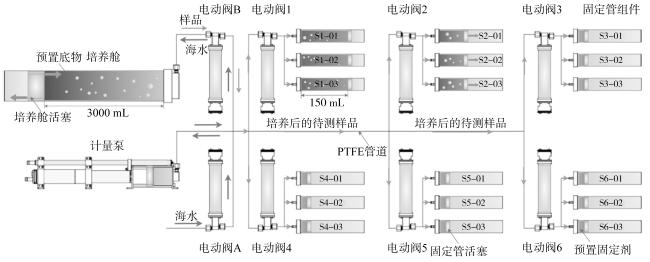
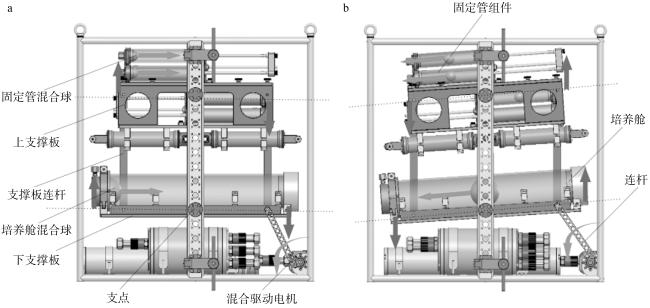
深海微生物在全球碳氮循环中起到重要作用, 目前对深海微生物的精细化研究主要以实验室高压模拟培养检测为主, 当深海样品采集至实验室培养检测时, 温度、压力等环境参数会有一定程度的变化, 影响后续的试验与检测。为此, 设计了一种用于深海微生物原位自动序列培养的装置(ocean automatic series incubation system, OASIS)。文章围绕OASIS的工作原理、系统组成和试验验证等方面展开论述, 重点研究深海液体转移精度问题。OASIS已经通过了水池试验、压力试验、海上试验等各项测试, 试验结果表明: 该装置能在30MPa高压下正常工作, 按照时间顺序自动完成对微生物的培养与生命信息固定, 对准确认识深海生态系统的生态效益提供了良好的设备支撑。
董自珍 , 刘纯虎 , 张宇 . 深海微生物原位自动序列培养装置的研发与试验[J]. 热带海洋学报, 2024 , 43(5) : 131 -142 . DOI: 10.11978/2023166
The global carbon and nitrogen cycles depend heavily on deep-sea microorganisms, and the majority of current, refined research on these organisms is based on high-pressure simulation culture and detection in laboratories. However, when deep-sea samples are brought in for culture and detection, the environmental parameters, such as temperature, pressure, etc, change at various degrees, which has an impact on the results of subsequent experiments and detection. For this reason, a device (ocean automatic series incubation system, OASIS) was developed for in situ automatic series incubation of deep-sea microorganisms. This research emphasizes the accuracy of deep-sea liquid transfer and focuses on the OASIS operating concept, system design, and experimental validation. The device can function normally under 30 MPa high pressure, and it can automatically finish the culture of microorganisms and the fixation of life information in accordance with the chronological order. These test results demonstrate that OASIS has passed the pressure, sea, pool, and other tests. They also accurately provide an understanding of the ecological benefits of deep-sea ecosystems. It offers strong equipment assistance for precisely identifying the ecological advantages of deep-sea environments.
Key words: in situ experiment; automation equipment; system design; serialization
表1 OASIS技术指标Tab. 1 Technical indicators of OASIS |
| 参数名词 | 技术指标 | 参数名词 | 技术指标 |
|---|---|---|---|
| 最大工作深度 | 6000m | 单个固定管最大容积 | 150mL |
| 最大工作时长 | >72h | 培养舱单次最大容积 | 3000mL |
| 固定管总数量 | 18个 | 单台装置空气中总重 | 55kg |
| 样品转移精度 | ±2mL | 压力传感器检测精度 | ±0.1MPa |
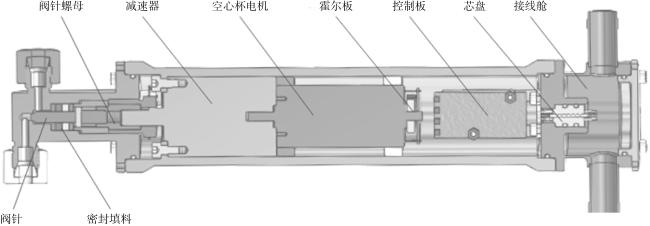
图10 电动阀填料结构a. 组合密封圈; b. U型圈 Fig. 10 Packing structure of motorized valves. (a) Combined seal ring; (b) U-ring |
表2 填料压力测试数据记录Tab. 2 Data logging of packing pressure tests |
| 序号 | 密封填料材质 | 开启过程扭矩/(N∙m) | 关闭过程扭矩/(N∙m) | 拧紧力矩/(N∙m) | 试验现象 |
|---|---|---|---|---|---|
| 1 | A-UPE B-PTFE | 7.0 | 5 | 9.0 | 保压30min出现泄露 |
| 2 | A-UPE B-PTFE+玻璃纤维 | 6.5 | 5 | 8.0 | 保压4h无泄漏, 但阀针运行有异响 |
| 3 | A-UPE B-PTFE+石墨 | 7.5 | 6 | 9.5 | 保压4h无泄漏, UPE填料明显磨损 |
| 4 | U型圈 | 6.0 | 5 | 8.0 | 保压24h无泄漏, U型圈无明显磨损 |
表3 海上应用数据记录Tab. 3 Offshore application data logging |
| 潜次 | 经度/°E | 纬度/°N | 深度/m | 试验时长/h | 获取样品体积/mL | 固定管取样误差/% |
|---|---|---|---|---|---|---|
| 1 | 110°35′ 34.80″ | 18° 38′ 36.24″ | 103 | 4 | 2691 | -2.0~0.7 |
| 2 | 111°20′ 27.96″ | 18° 05′ 48.48″ | 1874 | 8 | 2716 | 0~2 |
| 3 | 111° 43′ 15.60″ | 18° 13′ 01.20″ | 1614 | 8 | 2707 | -1.3~1.3 |
| 4 | 111° 06′ 44.64″ | 19° 07′ 12.72″ | 109 | 4 | 2412 | 0~1.3 |
| [1] |
董胜, 廖振焜, 于立伟, 等, 2023. 海洋科考装备技术发展战略研究[J]. 中国工程科学, 25(3): 33-41.
|
| [2] |
冯景春, 梁健臻, 张偲, 等, 2020. 深海生物资源开发装备发展研究[J]. 中国工程科学, 22(6): 67-75.
|
| [3] |
黄铎佳, 2012. 海底热液有机物采样器关键技术研究[D]. 杭州: 浙江大学.
|
| [4] |
林鹏, 2020. 深海沉积物原位定植培养工作站系统设计[D]. 杭州: 杭州电子科技大学.
|
| [5] |
卢晓亭, 俞建成, 孙朝阳, 等, 2023. 基于海洋机器人的科学观测与实验系统研究现状与展望[J]. 海洋技术学报, 42(4): 107-120.
|
| [6] |
渠继东, 周念福, 张亦驰, 等, 2021. 深海载人原位研究装备发展概述[J]. 舰船科学技术, 43(15): 148-153.
|
| [7] |
王风平, 周悦恒, 张新旭, 等, 2013. 深海微生物多样性[J]. 生物多样性, 21(4): 446-456.
|
| [8] |
王勇, 郑鹏飞, 贺丽生, 等, 2022. 深海生物原位实验与生态监测研究进展[J]. 应用海洋学学报, 41(3): 543-553.
|
| [9] |
吴怀超, 金波, 杨灿军, 等, 2010. 一种深海液压系统压力补偿装置的建模与应用[J]. 液压与气动, (5): 46-49.
|
| [10] |
吴俊飞, 杜照远, 李国栋, 等, 2017. 深海用新型压力自平衡装置的设计与分析[J]. 海洋技术学报, 36(6): 22-27.
|
| [11] |
张乐天, 2023. 应用于深海沉积物微生物原位培养的智能化注液装置设计[D]. 杭州: 杭州电子科技大学.
|
| [12] |
张宇, 2022. 环境模拟技术与原位试验技术在深海生物研究中的应用与展望[J]. 前瞻科技, 1(2): 134-144.
|
| [13] |
赵羿羽, 曾晓光, 金伟晨, 2019. 海洋科考装备体系构建及发展方向研究[J]. 舰船科学技术, 41(19): 1-6.
|
| [14] |
郦炳杰, 2018. 深海实验生态系统时间序列原位观测装置的研制[D]. 杭州: 浙江大学.
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}