
半潜式浮式风机基础水动力特性及系泊系统张力特性预测
|
李天阔(2004—), 男, 本科生, 主要从事波浪水动力研究。email: 202204330112@stu.csust.edu.cn |
Copy editor: 林强
收稿日期: 2024-09-13
修回日期: 2024-11-19
网络出版日期: 2024-11-25
基金资助
国家重点研发计划课题(2022YFC3103601)
省级大学生创新创业训练计划(S202410536097)
The hydrodynamic characteristics and the prediction of mooring system tensions for a semi-submersible floating wind turbine foundation
Copy editor: LIN Qiang
Received date: 2024-09-13
Revised date: 2024-11-19
Online published: 2024-11-25
Supported by
National Key Research and Development Program of China(2022YFC3103601)
The Provincial Undergraduate Training Program for Innovation and Entrepreneurship(S202410536097)
李天阔 , 屈科 , 李晓涵 , 王傲宇 , 王超 . 半潜式浮式风机基础水动力特性及系泊系统张力特性预测[J]. 热带海洋学报, 2025 , 44(3) : 36 -47 . DOI: 10.11978/2024177
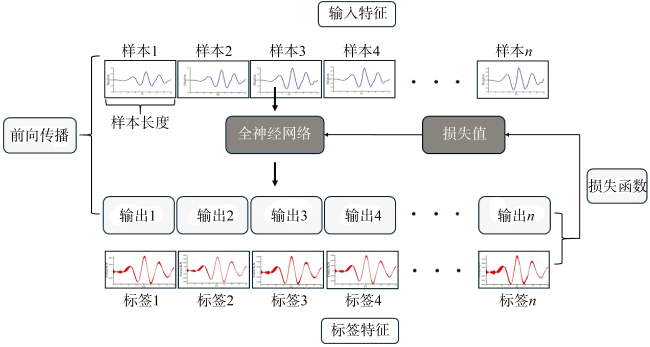
Climate change has caused frequent extreme sea conditions in China's coastal regions. This has resulted in significant dynamic movements of the semi-submersible floating wind turbine foundation at sea, leading to the slack-tension phenomenon of the mooring cables. This phenomenon greatly reduces the service life of the mooring system and poses a safety risk to the overall operation of the wind turbine platform. In order to achieve an efficient, accurate and low-cost safety warning for mooring systems, this paper proposes a method which uses a fully connected neural network to predict the load, dynamic response and tension characteristics of the mooring system based on wave conditions. Using numerical simulation, a database of wave heights and the load and motion response of the foundation of a semi-submersible floating wind turbine under extreme sea conditions was constructed, and then based on which a fully connected neural network method was used to learn and make predictions. The results showed that the prediction accuracy of the tension in the mooring cables, the motion response and the load of the wind turbine foundation reached 99.57%, 98.91% and 99.79%, respectively, which proved the feasibility and reliability of the method for predicting the safety of mooring systems and provided reference for the practical application of advanced safety warning for offshore wind turbines.
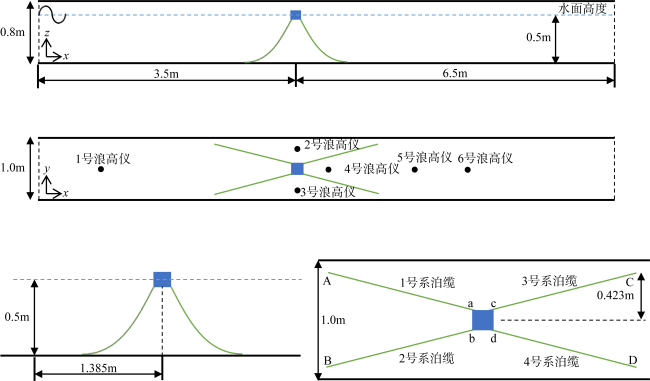
表1 聚焦波参数设置Tab. 1 Focused wave parameter setting |
| 工况 | 参数 | |||
|---|---|---|---|---|
| HF/m | T/s | xF/m | tF/s | |
| N1 | 0.0626 | 1.20 | 7.5 | 10.0 |
| N2 | 0.1750 | 1.25 | 7.2 | 10.0 |
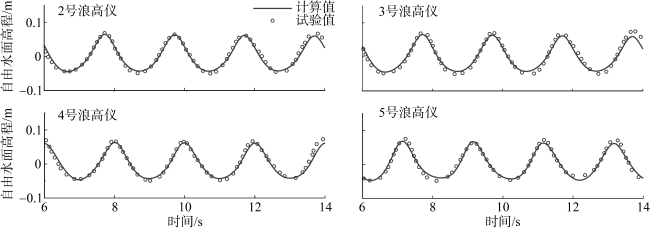
图3 实际聚焦位置数值模拟水位与实验数据对比Fig. 3 Numerical simulation of actual focused position compared with experimental data |
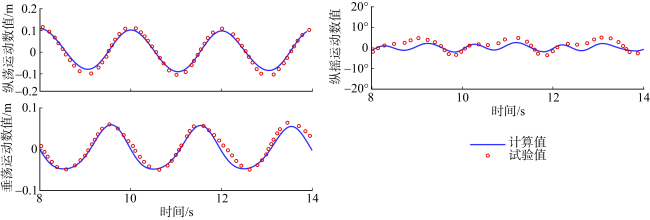
图4 浮箱的纵荡、纵摇、垂荡运动数值与实验数据对比Fig. 4 Comparison of surge, pitch and heave motions of floating tank with experimental data |
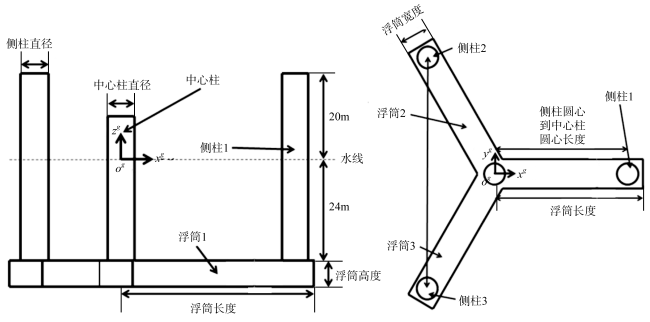
图6 无横撑平台侧视图(左)和上视图(右)Fig. 6 Braceless platform side view (left) and top view (right) |
表2 无横撑平台的主要设计参数Tab. 2 Main design parameters of braceless platform |
| 参数 | 设计参数 |
|---|---|
| 中心柱直径/m | 6.5 |
| 侧柱直径/m | 6.5 |
| 浮筒高度/m | 6 |
| 浮筒宽度/m | 9 |
| 侧柱圆心到中心柱圆心长度/m | 41 |
| 浮筒长度/m | 45.5 |
| 侧柱高度/m | 34 |
| 中心柱高度/m | 44 |
| 作业吃水/m | 30 |
| 排水体积/m3 | 10555 |
| 浮体总重量/kg | 9738000 |
表3 系泊系统的主要设计参数Tab. 3 Main design parameters of mooring system |
| 参数 | 设计参数值 |
|---|---|
| 相邻系泊缆的夹角 | 120° |
| 系泊点距离自由水面的距离/m | 200 |
| 导缆孔距离自由水面的距离/m | 18 |
| 系泊缆的原始长度/m | 835.5 |
| 系泊缆的直径/m | 0.0766 |
| 系泊缆的等效线密度/(kg·m-1) | 45.5 |
表4 系泊缆导缆孔(a-c)和锚固点(A-C)的全局坐标Tab. 4 Global coordinates of mooring guide holes (a-c) and anchor points (A-C) |
| 位置 | x/m | y/m | z/m |
|---|---|---|---|
| 导缆孔a | 144.25 | 100.0 | 182.0 |
| 导缆孔b | 77.875 | 138.322 | 182.0 |
| 导缆孔c | 77.875 | 61.778 | 182.0 |
| 锚固点A | 937.6 | 100.0 | 0.0 |
| 锚固点B | -318.8 | 825.4 | 0.0 |
| 锚固点C | -318.8 | -625.4 | 0.0 |
表5 计算工况Tab. 5 Calculation conditions |
| 工况编号 | 有效波高HS/m | 谱峰周期TP/s | 工况编号 | 有效波高HS/m | 谱峰周期TP/s |
|---|---|---|---|---|---|
| 1 | 1 | 10 | 26 | 13.5 | 10 |
| 2 | 1.5 | 10 | 27 | 14 | 10 |
| 3 | 2 | 10 | 28 | 14.5 | 10 |
| 4 | 2.5 | 10 | 29 | 3 | 12 |
| 5 | 3 | 10 | 30 | 5 | 12 |
| 6 | 3.5 | 10 | 31 | 5.5 | 12 |
| 7 | 4 | 10 | 32 | 6 | 12 |
| 8 | 4.5 | 10 | 33 | 7 | 12 |
| 9 | 5 | 10 | 34 | 7.5 | 12 |
| 10 | 5.5 | 10 | 35 | 8 | 12 |
| 11 | 6 | 10 | 36 | 8.5 | 12 |
| 12 | 6.5 | 10 | 37 | 9 | 12 |
| 13 | 7 | 10 | 38 | 9.5 | 12 |
| 14 | 7.5 | 10 | 39 | 10 | 12 |
| 15 | 8 | 10 | 40 | 10.5 | 12 |
| 16 | 8.5 | 10 | 41 | 11 | 12 |
| 17 | 9 | 10 | 42 | 11.5 | 12 |
| 18 | 9.5 | 10 | 43 | 3 | 14 |
| 19 | 10 | 10 | 44 | 5 | 14 |
| 20 | 10.5 | 10 | 45 | 7 | 14 |
| 21 | 11 | 10 | 46 | 7.5 | 14 |
| 22 | 11.5 | 10 | 47 | 8 | 14 |
| 23 | 12 | 10 | 48 | 3 | 8 |
| 24 | 12.5 | 10 | 49 | 5 | 8 |
| 25 | 13 | 10 | 50 | 7.5 | 8 |
表6 神经网络运行环境配置 Tab. 6 Configuration of neural network operating environment |
| 模型 | 参数类型 | 参数配置 |
|---|---|---|
| 全连接神经网络 | 激活函数 | Relu |
| 优化器 | Adam | |
| 损失函数 | MSE | |
| 丢弃层数量 | 2 | |
| 隐藏层数量 | 6 | |
| 隐藏层神经元数量 | 64 | |
| 迭代次数 | 10000 | |
| 批次大小 | 512 |
| [1] |
杜君峰, 王顺坤, 张德庆, 等, 2022. 基于神经网络模型的波候变化影响下深海系泊缆疲劳损伤评估[J]. 船舶力学, 26(8): 1189-1198.
|
| [2] |
高言乐, 2020. 风浪联合作用下Braceless半潜式风机动力特性分析[D]. 大连: 大连理工大学.
|
| [3] |
刘超, 2007. 海洋工程锚泊系统计算与分析[D]. 武汉: 武汉理工大学: 1-55.
|
| [4] |
马刚, 何栗兴, 张旭, 等, 2022. 向变极端相干阵风下浮式风机系泊线断裂风险因素分析[J]. 风机技术, 64(3): 57-62.
|
| [5] |
唐友刚, 张若瑜, 程楠, 等, 2009. 集中质量法计算深海系泊冲击张力[J]. 天津大学学报, 42(8): 695-701.
|
| [6] |
王春, 陆义超, 邢占清, 等, 2015. 基于神经网络算法的海上风机结构状态监测研究[J]. 中国水利水电科学研究院学报, 13(5): 344-351.
|
| [7] |
王瑞华, 张素侠, 刘习军, 2020. 浸没式浮筒对系泊缆松弛-张紧特性的影响研究[J]. 应用力学学报, 37(2): 543-549, 926.
|
| [8] |
易振宇, 蒋昌波, 屈科, 等, 2021. 聚焦波浪在浅堤上传播变形高精度数值模拟研究[J]. 海洋工程, 39(1): 32-42.
|
| [9] |
张德庆, 王超, 杜君峰, 2021. 基于人工神经网络算法的深海浮式系统动力响应预报方法[J]. 中国造船, 62(1): 123-132.
|
| [10] |
张素侠, 唐友刚, 林维学, 等, 2008. 水下缆绳松弛-张紧过程的冲击张力实验研究[J] 中国造船, 49(增刊2): 385-390.
|
| [11] |
仲凡, 连宇顺, 郑金海, 等, 2024. 不同材质共享缆绳对浮式风电场系泊响应的影响[J]. 中国舰船研究, 19(4): 59-70.
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}