
面向典型海洋现象观测的水下滑翔机应用综述
|
杨绍琼(1986—), 男, 安徽省宣城市人, 副教授, 博士研究生导师, 主要研究方向为深海智能装备、水下机器人和实验流体力学等。e-mail: |
Copy editor: 林强
收稿日期: 2021-05-28
修回日期: 2021-09-27
网络出版日期: 2021-10-09
基金资助
国家自然科学基金(11902219)
国家自然科学基金(52005365)
山东省支持青岛海洋科学与技术试点国家实验室重大科技专项(2018SDKJ0205)
Review on the application of underwater gliders for observing typical ocean phenomena
Copy editor: LIN Qiang
Received date: 2021-05-28
Revised date: 2021-09-27
Online published: 2021-10-09
Supported by
National Natural Science Foundation of China(11902219)
National Natural Science Foundation of China(52005365)
Marine S&T Fund of Shandong Province for Pilot National Laboratory for Marine Science and Technology (Qingdao)(2018SDKJ0205)
水下滑翔机是一种浮力驱动的无人水下自治观探测平台, 具有持续性、鲁棒性、自主性等特点, 是构建海洋观测技术体系重要的水下航行器之一。文章从水下滑翔机发展历程、运行方式和专用传感器展开, 基于国内外海洋学文献综述研究, 重点对水下滑翔机在典型海洋现象观测应用方面进行总结。水下滑翔机的运行稳定性、长时续, 观测高分辨率、低成本的特点, 满足了对海洋中尺度涡、内波、湍流、环流/边界流和锋面的长时间、精细化立体观测要求; 鲁棒性、自主性的特点使其能够适应台风过境、地震、原油泄漏前后等紧急恶劣海洋状况的监测; 运行平稳、低噪声的特点使其成为声学监测与探测的良好平台。对比分析国内外的水下滑翔机(组网)应用状况可以发现, 国内水下滑翔机在传感器、数据处理和组网技术方面都需要进一步完善。最后总结并展望了国内外水下滑翔机面向海洋现象观测的应用。
杨绍琼 , 成丹 , 陈光耀 , 罗辰奕 , 牛文栋 , 马伟 , 法帅 . 面向典型海洋现象观测的水下滑翔机应用综述[J]. 热带海洋学报, 2022 , 41(3) : 54 -74 . DOI: 10.11978/2021066
As a buoyancy-driven autonomous underwater observation platform, the underwater glider has characteristics of sustainability, robustness and autonomy. It is one of the important underwater vehicles to construct an ocean observation technology system. In this paper, the underwater glider's development history, operation mode and special sensors are introduced in detail. Based on the oceanographic literature at home and abroad, the application of underwater gliders for observing typical marine phenomena is summarized. The characteristics of the underwater glider, such as stability, long duration, high resolution, and low cost, meet the needs of long-time and carefully stereoscopic observations of mesoscale eddies, internal waves, turbulence, boundary flows, and fronts. The robustness and autonomy make it adapt to severe ocean conditions, such as typhoons, earthquakes and crude oil leakage before and after. The characteristics of stable operation and low noise also make it a good platform for acoustic monitoring and detection. Through comparative analysis and research on the application status of the underwater glider (networking) at home and abroad, we conclude that the sensor, data processing system and networking of the domestic underwater glider need to be further improved. Finally, we summarize and look forward to the application of underwater gliders for observing ocean phenomena at home and abroad.
Key words: underwater glider; ocean phenomenon; observation and detection; sensor
图1 水下滑翔机类型a来源于Slocum Glider - Woods Hole Oceanographic Institution (whoi.edu); b来源于Spray Glider - Woods Hole Oceanographic Institution (whoi.edu); c来源于Seaglider (washington.edu); d由“海燕”团队提供 Fig. 1 Types of underwater gliders. The picture in (a) is from Slocum Glider - Woods Hole Oceanographic Institution (whoi.edu); that in (b) is from Spray Glider - Woods Hole Oceanographic Institution (whoi.edu); that in (c) is from Seaglider (washington.edu); and that in (d) is provided by "Petrel" team |
表1 常用水下滑翔机可搭载的任务传感器Tab. 1 Common mission sensors for underwater gliders |
| 用途 | 传感器名称 | 主要用途 |
|---|---|---|
| 民用 | 温、盐、深测量仪(CTD) | 测量温度、深度和电导率 |
| 溶解氧传感器 | 测量溶解氧含量 | |
| 剪切流传感器 | 测量海洋流速剪切, 海洋湍流动能耗散率 | |
| 海流计 | 测量海水流速、方向 | |
| 声学多普勒流速剖面仪ADCP(acoustic Doppler current profiler) | 测量海水流速、流向等水文要素 | |
| 水质传感器 | 测量水中氨氮、叶绿素、含氧量、浊度等 | |
| 光学反向散射仪 | 监测海水悬浮物质 | |
| 高度计 | 测量仪器距海底的距离 | |
| 养分传感器 | 测量海水中养分含量 | |
| 叶绿素荧光计 | 测量叶绿素a的浓度 | |
| 有色可溶性有机物传感器 | 测量有色可溶性有机物含量 | |
| Gamma射线传感器 | 测量海水射线强度和海水放射性辐射 | |
| MicroRider | 湍流微结构测量 | |
| 声学反向散射仪 | 监测海水悬浮泥沙颗粒 | |
| PAR光合有效辐射(photosynthetically active radiation)模块 | 测定辐照度 | |
| pH传感器 | 监测海水pH | |
| 回声测深仪 | 测量海中浮游动物声波 | |
| 水听器 | 监测海中声波 | |
| 数字声学监测仪 | 实时记录处理海中音频 | |
| 军用 | 矢量声学传感器 | 水声研究、定位和跟踪、保卫港口安全、侦察 |
| 全方位声波传感器 | 探测水中振动和噪声, 评估碰撞的严重程度 | |
| 水声通讯调制解调器 | 进行水声通讯 |
表2 水下滑翔机在观测海洋中尺度涡中的应用Tab. 2 Application of underwater gliders for observing mesoscale eddies |
| 海域 | 时间 | AUG类型 | 机构 | 中尺度涡相关 | 相关文献 |
|---|---|---|---|---|---|
| 巴伦支海 | 2017/7 | Slocum | 苏格兰海洋科学协会 | 水体特征 | Porter et al, 2020 |
| 白令海峡 | 2017/8—9 | Seaglider | 华盛顿州太平洋海洋环境实验室 | 生产力 | Ladd et al, 2020 |
| 加利福尼亚 | 2003/8—2009/1 | 加利福尼亚合作海洋渔业调查 | 与加利福尼亚海流关系 | Pelland et al, 2013 | |
| 阿拉斯加湾 | 2005/8—10 | 美国华盛顿大学 | 水体特征 | Martin et al, 2009 | |
| 夏威夷海 | 2005/2—7 | 美国伍兹霍尔海洋研究所 | 生产力 | Nicholson et al, 2008 | |
| 南海 | 2015/4—6 | Seawing | 自然资源部第二海洋研究所 | 垂直温盐、非对称湍流混合结构 | Liu et al, 2019; Qi et al, 2020 |
| 2017/7—8 | 中国科学院南海海洋研究所 | 三维结构 | Shu et al, 2019 | ||
| 2007—2017 | 中山大学 | 边缘海面温度锋面 | Qiu et al, 2020 | ||
| 南海 | 2015/5 | Petrel-II | 中山大学 | 形状不对称原因 | Qiu et al, 2019 |
| 2017/7—8 | 天津大学 | 动力模型 | Wang et al, 2020a | ||
| 2017/8—29 | 三维结构、水下滑翔机组网最佳配置、源头 | Li et al, 2018, 2019, 2020 | |||
| 塔斯曼海西部 | 2009—2010 | Seaglider | 悉尼海洋科学研究所 | 水体入侵 | Baird and Ridgway, 2012 |
| 罗弗顿盆地中部 | 2012/7—2015/7 | 中国科学院南海海洋研究所 | 结构、演变 | Yu et al, 2017 | |
| 伊尔明格海 | 2006 | Spray | 美国斯克里普斯海洋研究所 | 结构和水文特征 | Fan et al, 2013 |
| 拉布拉多海 | 2004/9 | 丹麦法罗海洋研究所 | Hátún et al, 2007 | ||
| 拉布拉多海 | 2005/1 | 英国国家海洋中心 | 密度特征 | Frajka—Williams et al, 2014 | |
| 巴利阿里海域 | 2007/7—2008/6 | Slocum | 西班牙地中海高级研究院 | 温盐结构 | Bouffard et al, 2010 |
| 2009/12 | 热通量交换 | Ruiz et al, 2012 | |||
| 2014/9—12 | “Algerian Basin Circulation Unmanned Survey”观测项目 | 源头、演化及生产力 | Cotroneo et al, 2016 | ||
| 利古里亚海 | 2010/7 | Slocum | 意大利国家海洋和实验地球物理研究所 | 与强风关系 | Poulain et al, 2020 |
| 2013/6 | 挪威卑尔根大学 | 生产力 | Bosse et al, 2017 | ||
| 利翁湾 | 2012—2015 | Slocum | 法国佩皮尼昂大学 | 源头 | De Madron et al, 2017 |
图2 4台水下滑翔机穿过南海涡旋的轨迹彩色代表海平面高度异常; 黑框为研究区域; a、b、c、d是四台不同的水下滑翔机轨迹图, 绿色星为布放位置, 黑色星为回收位置。图片改自Li等(2018) Fig. 2 Trajectories of four underwater gliders crossing the South China Sea eddy. The color represents the sea-level height anomaly, and the black frame is the study area. (a, b, c, d) are the trajectory maps of four different underwater gliders, with the green star indicating their locations. The black star is the recovery location. After Li et al (2018) |
表3 水下滑翔机在观测台风作用下海洋中的应用Tab. 3 Application of underwater gliders for observing ocean influenced by typhoon |
| 海域 | 时间 | AUG类型 | 机构 | 台风相关 | 相关文献 |
|---|---|---|---|---|---|
| 西北太平洋 | 2010/9 | Seaglider | 美国华盛顿大学 | 冷尾迹演变 | Mrvaljevic et al, 2013 |
| 2012/6 | 美国海军研究生院 | 光学传感器对比 | Chu et al, 2019 | ||
| 南海 | 2017 | Petrel-II | 天津大学 | 现场水文数据 | 周磊 等, 2019 |
| 北海 | 2014/8 | Slocum | 德国亥姆霍兹研究所 | 生产力 | Schultze et al, 2020 |
| 新泽西州 | 2011/8 | Slocum | 美国罗格斯大学 | 强度降低 | Glenn et al, 2016; Seroka et al, 2017 |
| 新泽西州 | 2012/10 | 泥沙再悬浮、输运 | Miles et al, 2015 | ||
| 中大西洋湾 | 2009/11 | 沉积物再悬浮 | Miles et al, 2013 | ||
| 百慕大 | 2014/10 | 美国伍兹霍尔海洋研究所 | 降水 | Steffen et al, 2020 | |
| 墨西哥湾 | 2017 | Spray | 美国伍兹霍尔海洋研究所 | 边界流 | Todd et al, 2018 |
| 波多黎各 | 2014/10 | Slocum | 美国迈阿密大学 | 盐度层 | Domingues et al, 2015 |
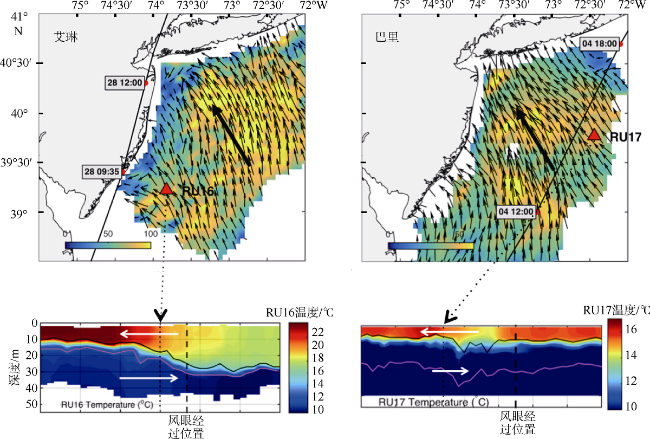
图3 飓风艾琳和巴里风眼经过之前, 高频雷达观测到的表面海流和RU16、RU17水下滑翔机观测到的温度黑色箭头为观测到的海流方向, 红色三角形为RU16和RU17水下滑翔机位置, 温度图中黑色轮廓线为温跃层, 白色箭头为层流方向。改自Seroka等(2017) Fig. 3 Surface currents observed by HF radar and temperatures observed by RU16 and RU17 underwater gliders before hurricanes Irene and Barry eye passing. Black arrow indicates general direction of surface current. Locations of RU16 and RU17 Slocum gliders are shown by red triangles. The black outline in the temperature diagram is thermocline. White arrow indicates general direction of layer current. After Seroka et al (2017) |
表4 水下滑翔机在观测内波湍流中的应用Tab. 4 Application of underwater gliders for observing internal wave and turbulence |
| 海域 | 时间 | AUG类型 | 机构 | 内波湍流相关 | 相关文献 |
|---|---|---|---|---|---|
| 加拿大海盆冰区 | 2014/7—10 | Seaglider | 美国伍兹霍尔海洋研究所 | 冰盖水域 | Cole et al, 2018 |
| 格陵兰海 | 2006/11—2009/11 | 美国华盛顿大学 | 湍流动能耗散 | Beaird et al, 2012 | |
| 波弗特海东南部 | 2015/8—9 | Slocum | 加拿大英属哥伦比亚大学 | 强分层对湍流作用 | Scheifele et al, 2021 |
| 吕宋海峡 | 2007/4—2008/7 | Spray | 美国斯克里普斯海洋研究所 | 内波频谱 | Rudnick et al, 2013 |
| 南海 | 2011/6—8 | 内潮能量通量 | Johnston et al, 2013 | ||
| 南海 | 2007 | Spray | 美国华盛顿大学 | 振幅、相位 | Rainville et al, 2013 |
| 南海 | 2015/2 | Petrel | 天津大学 | 湍流动能耗散率 | 马伟 等, 2017 |
| 2017/7—8 | Petrel-II | 内波特征 | Ma et al, 2018 | ||
| 利翁湾 | 2008 | Slocum | 英国南安普顿国家海洋中心 | 内波速度 | Merckelbach et al, 2010 |
| 法罗群岛 | 2012/6 | 挪威卑尔根大学 | 湍流动能耗散率 | Fer et al, 2014 | |
| 拉布拉多海 | 2004/9—2005/4 | Seaglider | 英国南安普顿国家海洋中心 | 垂直速度方法 | Frajka-Williams et al, 2011 |
| 凯尔特海 | 2012/6 | Slocum | 湍流动能耗散率 | Palmer et al, 2015 | |
| 墨西哥湾 | 2016/7 | Slocum | 美国斯坦尼斯航天中心海军研究实验室 | 热分层昼间暖层的演化 | Wijesekera et al, 2020 |
| 巴哈马群岛 | 2017/11—2018/3 | Seaglider | 英国南安普顿国家海洋学中心和西班牙维戈海洋研究所 | 涡旋内波破碎、湍流耗散 | Fernández-Castro et al, 2020 |
表5 水下滑翔机在观测锋面中的应用Tab. 5 Application of underwater gliders for observing ocean fronts |
| 海域 | 时间 | AUG类型 | 机构 | 锋面相关 | 相关文献 |
|---|---|---|---|---|---|
| 南加州 | 2006—2011 | Spray | 美国斯克里普斯海洋研究所 | 浮游动植物 | Powell et al, 2015 |
| 日本海 | 2016/4—6 | Seaglider | 日本海洋国家渔业研究所 | 副极地锋和对马暖流 | Wagawa et al, 2020 |
| 秘鲁附近 | 2013/1 | Slocum | 德国亥姆霍兹海洋研究中心 | 氧气最小区域流通问题 | Thomsen et al, 2016 |
| 墨西哥湾 | 2012/3 | 美国俄勒冈州立大学 | 锋面边缘暖流 | Sanchez-Rios et al, 2020 | |
| 巴利阿里海域 | 2007/7、9 | 巴利阿里大学 | 巴利阿里锋 | Ruiz et al, 2009 | |
| 南极半岛东部 | 2012/1 | Seaglider | “水下滑翔机: 观察海洋的优秀新工具”项目 | 斜坡锋 | Heywood et al, 2014 |
| 南极边缘冰区 | 2018/12— 2019/3 | 瑞典哥德堡大学 | 风锋相互作用 | Swart et al, 2020 |
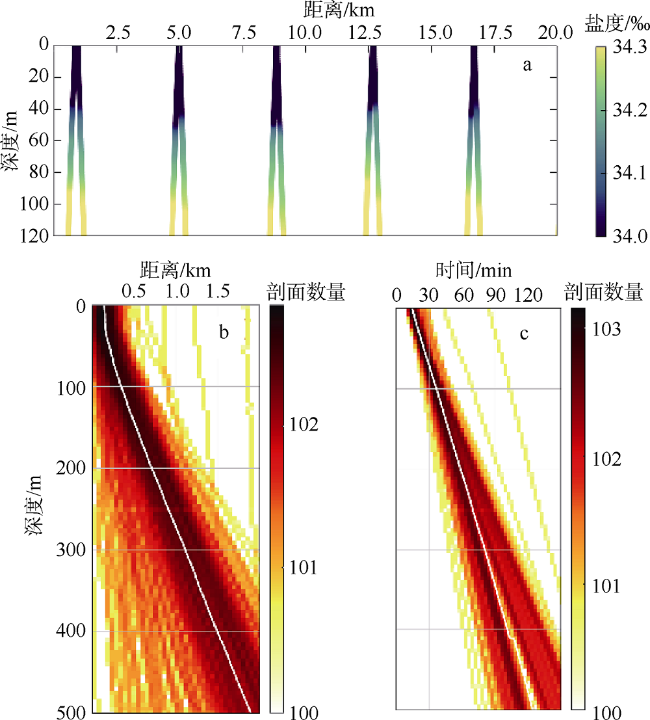
图5 Seaglider水下滑翔机上升下降剖面观测结果a. 观测区域上层海洋的盐度图; b. 上升下降剖面之间水平距离分布图; c. 上升下降剖面之间的时间分布图。白线为中间值, 改自Swart等(2020) Fig. 5 Seaglider climb-dive profiles of observations. (a) is the salinity data of the upper ocean in the observation area. Distributions of (b) horizontal distance and (c) time between sequential glider climb and dive profiles are shown. The median is indicated by a white line. After Swart et al (2020) |
表6 水下滑翔机在观测边界流及部分大洋环流中的应用Tab. 6 Application of underwater gliders for observing boundary current |
| 海域 | 时间 | AUG类型 | 机构 | 边界流相关 | 相关文献 |
|---|---|---|---|---|---|
| 斯瓦尔巴群岛 | 2018/9—11 | Seaglider | 挪威卑尔根大学地球物理研究所 | 暖大西洋边界流 | Kolås et al, 2020 |
| 美国南加州 | 2006—2009 | Spray | 美国斯克里普斯海洋研究所 | 加利福尼亚环流 | Todd et al, 2011 |
| 吕宋海峡 | 2012/6—2013/6 | Seaglider | 美国华盛顿大学 | 黑潮 | Lien et al, 2014 |
| 菲律宾海 | 2009/6—2014/1 | Spray | 美国斯克里普斯海洋研究所 | 北赤道洋流 | Schönau et al, 2015 |
| 菲律宾东岸 | 2009/9—2013/10 | 棉兰老洋流观测项目 | 棉兰老洋流 | Schönau et at, 2017 | |
| 所罗门海 | 2007—2010 | Consortium on the Ocean's Role in Climate | 新几内亚海岸潜流 | Davis et al, 2012 | |
| 所罗门群岛 | 2005/7—10 | 新喀里多尼亚发展研究所 | 南赤道洋流 | Gourdeau et al, 2008 | |
| 秘鲁南部 | 2008/10—11 | Slocum | 法国索邦大学 | 秘鲁上升流 | Pietri et al, 2013 |
| 美国北卡罗来纳州附近 | 2004—2009 | Spray | 美国伍兹霍尔海洋研究所 | 墨西哥湾流 | Todd et al, 2016; Todd, 2017; |
| 美国东海岸 | 2004—2020 | 美国麻省理工学院-伍兹霍尔海洋学院海洋学联合项目 | 墨西哥湾流 | Heiderich et al, 2020 | |
| 澳大利亚东南部 | 2008—2014 | Slocum | 澳大利亚新南威尔士大学 | 东澳大利亚洋流 | Schaeffer et al, 2015 |
| 非洲东南海岸 | 2015/4 | Seaglider | 阿古拉斯大陆架滑翔机实验 | 阿古拉斯洋流 | Krug et al, 2017 |
| 罗科尔深海高原 | 2014/6—2016/6 | 苏格兰海洋科学协会 | 北大西洋洋流 | Houpert et al, 2018 | |
| 印度洋塞舌尔丹尼斯岛 | 2018/3—6 | Spray | 美国伍兹霍尔海洋研究所 | 赤道环流 | Todd, 2020a |
| 加拉帕戈斯群岛西部 | 2013/10—2016/10 | Spray | 美国斯克利普斯海洋学研究所 | 赤道潜流、南赤道洋流 | Rudnick et al, 2021 |
| 2013/1—2016/12 | 美国麻省理工学院-伍兹霍尔海洋学院海洋学联合项目 | 赤道洋流系统 | Jakoboski et al, 2020 |
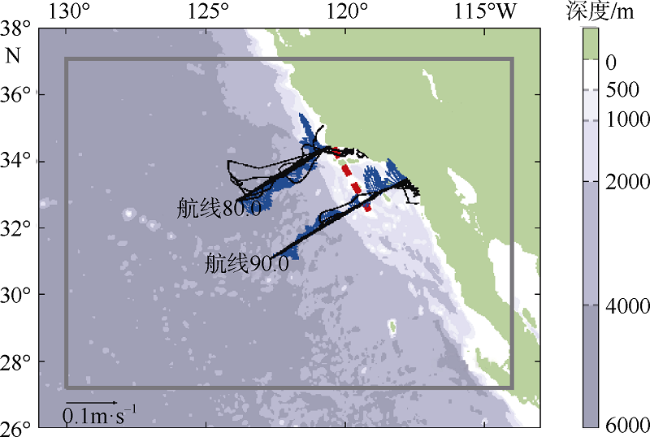
图6 水下滑翔机观测路线深度图(彩色)黑色线为沿CalCOFI线80.0和90.0的水下滑翔机部署轨迹, 蓝色矢量为上层海洋500m的垂直平均流, 比例向量在左下角给出。红色虚线表示圣罗莎山脊, 它是南加州湾的离岸边界。改自Todd等(2011) Fig. 6 Depth map (color) of underwater glider observation routes. The black line is tracks of glider deployments along CalCOFI Lines 80.0 and 90.0 (black) and the blue vector is the vertical average current of 500m in the upper ocean. A scale vector is given at the lower left. Dashed red line denotes the Santa Rosa Ridge, which is the offshore boundary of the Southern California Bight. After Todd et al (2011) |
表7 水下滑翔机在观测水质水文中的应用Tab. 7 Application of underwater gliders for observing water quality and hydrology |
| 海域 | 时间 | AUG类型 | 机构 | 水质特征 | 相关文献 |
|---|---|---|---|---|---|
| 南加州海岸 | 2006/9—10 | Spray | 美国斯克里普斯海洋研究所 | 叶绿素 | Todd et al, 2009 |
| 南加州中部 | 2010/2—6 | Slocum | 美国宇航局戈达德航天飞行中心 | 浮游植物 | Seegers et al, 2015 |
| 澳大利亚东南部 | 2008/7—12 | 悉尼科技大学 | 叶绿素 | Baird et al, 2011 | |
| 冰岛南部 | 2008/4 | Seaglider | 美国伍兹霍尔海洋研究所 | 水华 | Mahadevan et al, 2012 |
| 北海 | 2013 | 英国东安格利亚大学 | 温盐 | Sheehan et al, 2020 | |
| 凯尔特海 | 2015/4 | 英国南安普敦大学 | 硝酸盐 | Vincent et al, 2018 | |
| 波克潘深海平原 | 2012—2013 | 英国环境、渔业和水产养殖科学中心 | 水华 | Binetti et al, 2020 | |
| 维戈近海 | 2010/6—8 | 英国东安格利亚大学 | 浮游植物 | Rollo et al, 2020 | |
| 新泽西州 | 2006/4—9 | Slocum | 美国罗格斯大学 | 温盐季节变化 | Castelao et al, 2008b |
| 华盛顿州 | 2003/9—2007/12 | Seaglider | 美国缅因大学 | 水华 | Perry et al, 2008 |
| 中大西洋湾 | 2003/10—2004/11 | Slocum | 美国罗格斯大学 | 温盐年际变化 | Castelao et al, 2008a |
| 2003/10 | 水华 | Schofield et al, 2008 | |||
| 中大西洋湾 | 2006/3—4、2007/7—10 | Spray | 美国伍兹霍尔海洋研究所 | 水平温盐变化 | Todd et al, 2013 |
| 中大西洋湾 | 2006—2008 | Slocum | 美国罗格斯大学 | 水华 | Xu et al, 2013 |
| 2005 | 浮游植物 | Xu et al, 2011 | |||
| 2018/5—2019/11 | 碳酸盐 | Wright et al, 2020 | |||
| 大西洋斯科舍陆架 | 2015 | Slocum | 加拿大达尔豪斯大学 | 浮游动物 | Ruckdeschel et al, 2020 |
| 亚得里亚海坑 | 2013—2016 | Seaglider、Slocum | 意大利国家海洋和实验地球物理研究所 | 盐度变化 | Kokkini et al, 2020 |
| 罗特尼斯岛 | 2009、2010、2011、2015、2016 | Slocum | 西澳大学海洋研究所 | 叶绿素 | Chen et al, 2020 |
| 南极威德尔海 | 2012/1—3 | Seaglider | 英国东安格利亚大学 | 生产力 | Biddle et al, 2015 |
| 北极白令海 | 2019/9 | Petrel | 天津大学 | 温度、溶解氧 | 杨绍琼 等, 2021 |
图7 在两种不同的混合层深度(白线)下Fv′/Fm′(光合效率)、Fm′(代表浮游植物生物量)和温度的平均日循环圆点为FIRe水下滑翔机实际观测值。改自Carvalho等(2016) Fig. 7 Averaged diel cycles of Fv′/Fm′ (photosynthetic efficiency), Fm′ (proxy for phytoplankton biomass) and temperature for mixed-layer depth (white line) regimes. Dots represent actual FIRe glider measurements. After Carvalho et al (2016) |
表8 水下滑翔机在声学方面的应用Tab. 8 Application of underwater gliders in marine acoustics |
| 海域 | 时间 | AUG类型 | 机构 | 声学相关 | 相关文献 |
|---|---|---|---|---|---|
| 罗弗顿群岛 | 2018/3—5 | Seaglider | 挪威特罗姆瑟大学 | 座头鲸、抹香鲸、海豚 | Aniceto et al, 2020 |
| 加州蒙特利近海 | 2006/8 | 美国阿拉斯加渔业科学中心 | 蓝鲸、座头鲸、抹香鲸 | Moore et al, 2007 | |
| 夏威夷西海岸 | 2009/10—11 | 美国国家海洋大气局太平洋海洋环境实验室 | 喙鲸 | Klinck et al, 2012 | |
| 韩国浦项 | 2017/11 | Slocum | 韩国西江大学 | 地震声音 | Lee et al, 2019 |
| 马里亚纳海沟 | 2018/4 | Petrel-II | 浙江大学 | 减少自噪声算法 | Jiang et al, 2019, 2021 |
| 南海 | 2018/8 | ||||
| 南海 | 2016/8 | Petrel-Ⅱ | 中国科学院声学研究所 | 南海水下噪声谱图 | Liu et al, 2018 |
| 劳盆地 | 2010/5 | Slocum | 美国俄勒冈州立大学 | 海底火山活动化学水声特征 | Matsumoto et al, 2010 |
| 新南威尔士州 | 2009/5 | 澳大利亚新南威尔士州国防科学与技术机构 | 海豚 | Ferguson et al, 2010 | |
| 美国 缅因州 | 2005/5 | Slocum | 美国伍兹霍尔海洋研究所 | 塞鲸、北尾长鲸 | Baumgartner et al, 2008 |
| 2015、2016 | 须鲸、长须鲸、鳕鲸和北大西洋露脊鲸 | Baumgartner et al, 2020 | |||
| 西佛罗里达 | 2009/7 | Slocum | 美国南佛罗里达大学 | 红色石斑鱼、蟾蜍、未知生物 | Wall et al, 2012 |
| 地中海 | 2017/9—10 | SeaExplorer | 比利时功能和进化形态学实验室 | 10种鱼类声音 | Bolgan et al, 2020 |
| 南极半岛东部 | 2012/1 | Seaglider | 英国剑桥南极考察 | 南极磷虾 | Guihen et al, 2014 |
| [1] |
蔡树群, 何建玲, 谢皆烁, 2011. 近10年来南海孤立内波的研究进展[J]. 地球科学进展, 26(7): 703-710.
|
| [2] |
陈刚, 张云海, 赵加鹏, 2014. 基于混合模型的水下滑翔机最佳升阻比特性[J]. 四川兵工学报, 35(2): 150-152.
|
| [3] |
李健, 李梦春, 翁震平, 等, 2019. 水下物流概念、模式及未来发展研究[J]. 指挥与控制学报, 5(3): 209-214.
|
| [4] |
刘方, 2014. 混合驱动水下滑翔机系统设计与运动行为研究[D]. 天津: 天津大学: 32-166.
|
| [5] |
马伟, 王延辉, 徐田雨, 2017. 微结构湍流测量水下滑翔机设计与试验研究[J]. 机械工程学报, 53(9): 22-29.
|
| [6] |
倪园芳, 马捷, 王俊雄, 2008. 水下滑翔机浮力系统的机理和调节性能[J]. 船海工程, 37(1): 95-99.
|
| [7] |
钱洪宝, 卢晓亭, 2019. 我国水下滑翔机技术发展建议与思考[J]. 水下无人系统学报, 27(5): 474-479.
|
| [8] |
秦玉峰, 张选明, 孙秀军, 等, 2016. 混合驱动水下滑翔机高效推进螺旋桨设计[J]. 海洋技术学报, 35(3): 40-45.
|
| [9] |
任杰, 2019. 海洋观测技术[M]. 广州: 中山大学出版社.
|
| [10] |
沈新蕊, 王延辉, 杨绍琼, 等, 2018. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 26(2): 89-106.
|
| [11] |
田文龙, 宋保维, 刘郑国, 2013. 可控翼混合驱动水下滑翔机运动性能研究[J]. 西北工业大学学报, 31(1): 122-128.
|
| [12] |
王超, 孙芹东, 王文龙, 等, 2018. 水下目标警戒滑翔机声学系统设计与实现[C]// 2018年鲁浙苏黑四省声学技术学术交流会论文集. 青岛: 《声学技术》编辑部: 4
|
| [13] |
王树新, 李晓平, 王延辉, 等, 2005. 水下滑翔器的运动建模与分析[J]. 海洋技术, 24(1): 5-9.
|
| [14] |
王树新, 王延辉, 张大涛, 等, 2006. 温差能驱动的水下滑翔器设计与实验研究[J]. 海洋技术, 25(1): 1-5.
|
| [15] |
王文龙, 王超, 韩梅, 等, 2019. 矢量水听器在水下滑翔机上的应用研究[J]. 兵工学报, 40(12): 2580-2586.
|
| [16] |
吴立新, 陈朝晖, 2013. 物理海洋观测研究的进展与挑战[J]. 地球科学进展, 28(05): 542-551.
|
| [17] |
吴立新, 陈朝晖, 林霄沛, 等, 2020. “透明海洋”立体观测网构建[J]. 科学通报, 65(25): 2654-2661.
|
| [18] |
薛冬阳, 2017. 水下滑翔机编队协调控制与不确定性研究[D]. 天津: 天津大学.
|
| [19] |
杨绍琼, 李逸铭, 陈红霞, 等, 2021. 基于水下滑翔机观测数据的白令海海盆区域温度及溶解氧特征分析[J]. 海洋科学进展, 39(3): 355-363.
|
| [20] |
易镇辉, 俞建成, 毛华斌, 等, 2019. 一种水下滑翔机盐度数据的噪声处理方法[J]. 水下无人系统学报, 27(5): 503-513.
|
| [21] |
张润锋, 杨绍琼, 牛文栋, 等, 2020. 强扰动环境下水下滑翔机编队稳定性分析[J]. 舰船科学技术, 42(12): 67-71.
|
| [22] |
周磊, 陈大可, 雷小途, 等, 2019. 海洋与台风相互作用研究进展[J]. 科学通报, 64(1): 60-72.
|
| [23] |
邹达明, 2019. 喷水推进型长航程水下滑翔机耐压壳体优化研究[D]. 武汉: 华中科技大学: 3-5.
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
|
| [97] |
|
| [98] |
|
| [99] |
|
| [100] |
|
| [101] |
|
| [102] |
|
| [103] |
|
| [104] |
|
| [105] |
|
| [106] |
|
| [107] |
|
| [108] |
|
| [109] |
|
| [110] |
|
| [111] |
|
| [112] |
|
| [113] |
|
| [114] |
|
| [115] |
|
| [116] |
|
| [117] |
|
| [118] |
|
| [119] |
|
| [120] |
|
| [121] |
|
| [122] |
|
| [123] |
|
| [124] |
|
| [125] |
|
| [126] |
|
| [127] |
|
| [128] |
|
| [129] |
|
| [130] |
|
| [131] |
|
| [132] |
|
| [133] |
|
| [134] |
|
| [135] |
|
| [136] |
|
| [137] |
|
| [138] |
|
| [139] |
|
| [140] |
|
| [141] |
|
| [142] |
|
| [143] |
|
| [144] |
|
| [145] |
|
| [146] |
|
| [147] |
|
| [148] |
|
| [149] |
|
/
| 〈 |
|
〉 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}