
热带海洋学报 ›› 2022, Vol. 41 ›› Issue (3): 54-74.doi: 10.11978/2021066CSTR: 32234.14.2021066
面向典型海洋现象观测的水下滑翔机应用综述
杨绍琼1,2,3( ), 成丹1, 陈光耀1, 罗辰奕1, 牛文栋1,2,3(), 马伟1,2,3, 法帅3
), 成丹1, 陈光耀1, 罗辰奕1, 牛文栋1,2,3(), 马伟1,2,3, 法帅3
- 1.天津大学机械工程学院机构理论与装备设计教育部重点实验室, 天津 300350
2.天津大学青岛海洋技术研究院, 山东 青岛 266237
3.青岛海洋科学与技术试点国家实验室, 海洋观测与探测联合实验室, 山东 青岛 266237
-
收稿日期:2021-05-28修回日期:2021-09-27发布日期:2021-10-09 -
通讯作者:牛文栋 -
作者简介:杨绍琼(1986—), 男, 安徽省宣城市人, 副教授, 博士研究生导师, 主要研究方向为深海智能装备、水下机器人和实验流体力学等。e-mail:shaoqiongy@tju.edu.cn -
基金资助:国家自然科学基金(11902219);国家自然科学基金(52005365);山东省支持青岛海洋科学与技术试点国家实验室重大科技专项(2018SDKJ0205)
Review on the application of underwater gliders for observing typical ocean phenomena
YANG Shaoqiong1,2,3(), CHENG Dan1, CHEN Guangyao1, LUO Chenyi1, NIU Wendong1,2,3(), MA Wei1,2,3, FA Shuai3
- 1. Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education, School of Mechanical Engineering, Tianjin University, Tianjin 300350, China
2. Qingdao Institute for Ocean Engineering, Tianjin University, Qingdao 266237, China
3. The Joint Laboratory of Ocean Observing and Detection, Pilot National Laboratory for Marine Science and Technology (Qingdao), Qingdao 266237, China
-
Received:2021-05-28Revised:2021-09-27Published:2021-10-09 -
Contact:NIU Wendong -
Supported by:National Natural Science Foundation of China(11902219);National Natural Science Foundation of China(52005365);Marine S&T Fund of Shandong Province for Pilot National Laboratory for Marine Science and Technology (Qingdao)(2018SDKJ0205)
摘要:
水下滑翔机是一种浮力驱动的无人水下自治观探测平台, 具有持续性、鲁棒性、自主性等特点, 是构建海洋观测技术体系重要的水下航行器之一。文章从水下滑翔机发展历程、运行方式和专用传感器展开, 基于国内外海洋学文献综述研究, 重点对水下滑翔机在典型海洋现象观测应用方面进行总结。水下滑翔机的运行稳定性、长时续, 观测高分辨率、低成本的特点, 满足了对海洋中尺度涡、内波、湍流、环流/边界流和锋面的长时间、精细化立体观测要求; 鲁棒性、自主性的特点使其能够适应台风过境、地震、原油泄漏前后等紧急恶劣海洋状况的监测; 运行平稳、低噪声的特点使其成为声学监测与探测的良好平台。对比分析国内外的水下滑翔机(组网)应用状况可以发现, 国内水下滑翔机在传感器、数据处理和组网技术方面都需要进一步完善。最后总结并展望了国内外水下滑翔机面向海洋现象观测的应用。
中图分类号:
- P715
引用本文
杨绍琼, 成丹, 陈光耀, 罗辰奕, 牛文栋, 马伟, 法帅. 面向典型海洋现象观测的水下滑翔机应用综述[J]. 热带海洋学报, 2022, 41(3): 54-74.
YANG Shaoqiong, CHENG Dan, CHEN Guangyao, LUO Chenyi, NIU Wendong, MA Wei, FA Shuai. Review on the application of underwater gliders for observing typical ocean phenomena[J]. Journal of Tropical Oceanography, 2022, 41(3): 54-74.
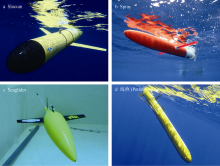
图1
水下滑翔机类型 a来源于Slocum Glider - Woods Hole Oceanographic Institution (whoi.edu); b来源于Spray Glider - Woods Hole Oceanographic Institution (whoi.edu); c来源于Seaglider (washington.edu); d由“海燕”团队提供"

图1
表1
常用水下滑翔机可搭载的任务传感器"
| 用途 | 传感器名称 | 主要用途 |
|---|---|---|
| 民用 | 温、盐、深测量仪(CTD) | 测量温度、深度和电导率 |
| 溶解氧传感器 | 测量溶解氧含量 | |
| 剪切流传感器 | 测量海洋流速剪切, 海洋湍流动能耗散率 | |
| 海流计 | 测量海水流速、方向 | |
| 声学多普勒流速剖面仪ADCP(acoustic Doppler current profiler) | 测量海水流速、流向等水文要素 | |
| 水质传感器 | 测量水中氨氮、叶绿素、含氧量、浊度等 | |
| 光学反向散射仪 | 监测海水悬浮物质 | |
| 高度计 | 测量仪器距海底的距离 | |
| 养分传感器 | 测量海水中养分含量 | |
| 叶绿素荧光计 | 测量叶绿素a的浓度 | |
| 有色可溶性有机物传感器 | 测量有色可溶性有机物含量 | |
| Gamma射线传感器 | 测量海水射线强度和海水放射性辐射 | |
| MicroRider | 湍流微结构测量 | |
| 声学反向散射仪 | 监测海水悬浮泥沙颗粒 | |
| PAR光合有效辐射(photosynthetically active radiation)模块 | 测定辐照度 | |
| pH传感器 | 监测海水pH | |
| 回声测深仪 | 测量海中浮游动物声波 | |
| 水听器 | 监测海中声波 | |
| 数字声学监测仪 | 实时记录处理海中音频 | |
| 军用 | 矢量声学传感器 | 水声研究、定位和跟踪、保卫港口安全、侦察 |
| 全方位声波传感器 | 探测水中振动和噪声, 评估碰撞的严重程度 | |
| 水声通讯调制解调器 | 进行水声通讯 |
表1
表2
水下滑翔机在观测海洋中尺度涡中的应用"
| 海域 | 时间 | AUG类型 | 机构 | 中尺度涡相关 | 相关文献 |
|---|---|---|---|---|---|
| 巴伦支海 | 2017/7 | Slocum | 苏格兰海洋科学协会 | 水体特征 | Porter et al, |
| 白令海峡 | 2017/8—9 | Seaglider | 华盛顿州太平洋海洋环境实验室 | 生产力 | Ladd et al, |
| 加利福尼亚 | 2003/8—2009/1 | 加利福尼亚合作海洋渔业调查 | 与加利福尼亚海流关系 | Pelland et al, | |
| 阿拉斯加湾 | 2005/8—10 | 美国华盛顿大学 | 水体特征 | Martin et al, | |
| 夏威夷海 | 2005/2—7 | 美国伍兹霍尔海洋研究所 | 生产力 | Nicholson et al, | |
| 南海 | 2015/4—6 | Seawing | 自然资源部第二海洋研究所 | 垂直温盐、非对称湍流混合结构 | Liu et al, |
| 2017/7—8 | 中国科学院南海海洋研究所 | 三维结构 | Shu et al, | ||
| 2007—2017 | 中山大学 | 边缘海面温度锋面 | Qiu et al, | ||
| 南海 | 2015/5 | Petrel-II | 中山大学 | 形状不对称原因 | Qiu et al, |
| 2017/7—8 | 天津大学 | 动力模型 | Wang et al, | ||
| 2017/8—29 | 三维结构、水下滑翔机组网最佳配置、源头 | Li et al, | |||
| 塔斯曼海西部 | 2009—2010 | Seaglider | 悉尼海洋科学研究所 | 水体入侵 | Baird and Ridgway, |
| 罗弗顿盆地中部 | 2012/7—2015/7 | 中国科学院南海海洋研究所 | 结构、演变 | Yu et al, | |
| 伊尔明格海 | 2006 | Spray | 美国斯克里普斯海洋研究所 | 结构和水文特征 | Fan et al, |
| 拉布拉多海 | 2004/9 | 丹麦法罗海洋研究所 | Hátún et al, | ||
| 拉布拉多海 | 2005/1 | 英国国家海洋中心 | 密度特征 | Frajka—Williams et al, | |
| 巴利阿里海域 | 2007/7—2008/6 | Slocum | 西班牙地中海高级研究院 | 温盐结构 | Bouffard et al, |
| 2009/12 | 热通量交换 | Ruiz et al, | |||
| 2014/9—12 | “Algerian Basin Circulation Unmanned Survey”观测项目 | 源头、演化及生产力 | Cotroneo et al, | ||
| 利古里亚海 | 2010/7 | Slocum | 意大利国家海洋和实验地球物理研究所 | 与强风关系 | Poulain et al, |
| 2013/6 | 挪威卑尔根大学 | 生产力 | Bosse et al, | ||
| 利翁湾 | 2012—2015 | Slocum | 法国佩皮尼昂大学 | 源头 | De Madron et al, |
表2
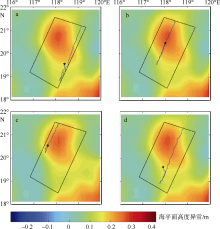
图2
4台水下滑翔机穿过南海涡旋的轨迹 彩色代表海平面高度异常; 黑框为研究区域; a、b、c、d是四台不同的水下滑翔机轨迹图, 绿色星为布放位置, 黑色星为回收位置。图片改自Li等(2018)"
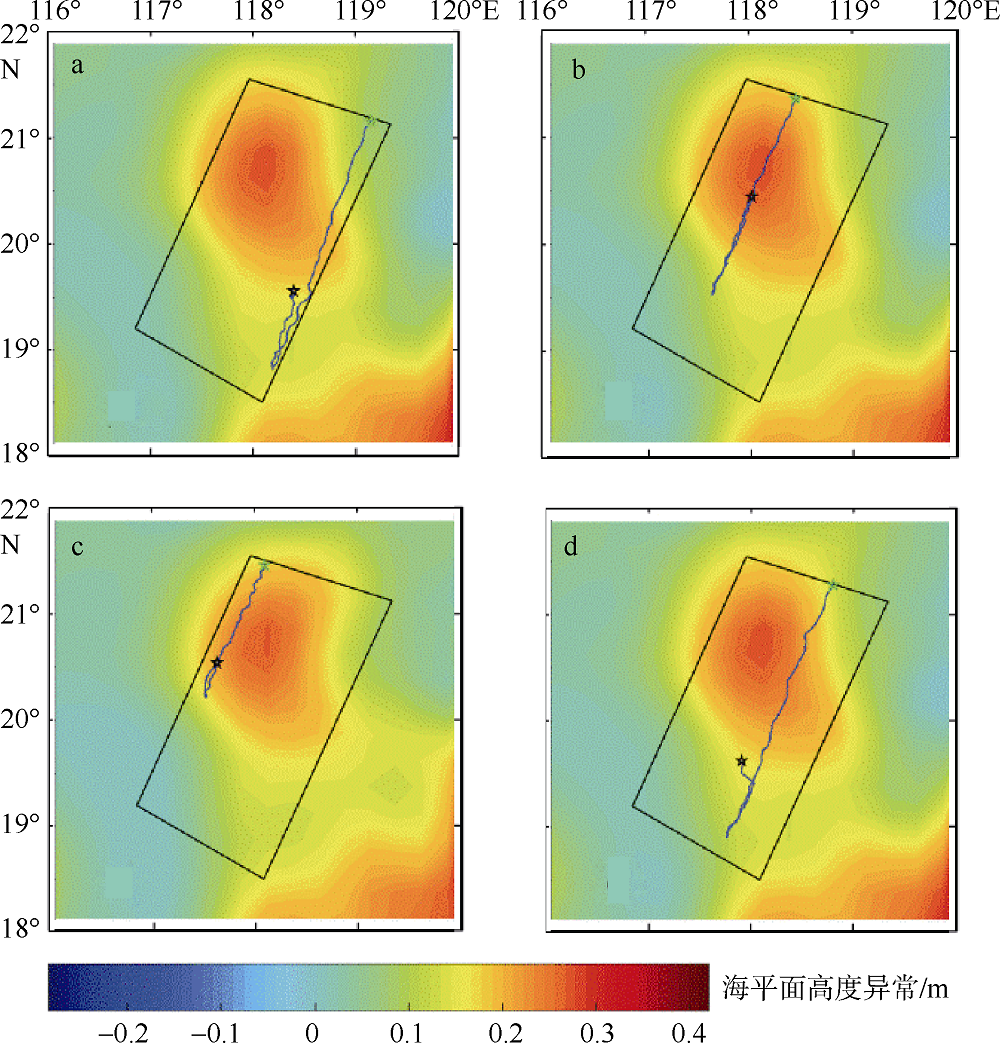
图2
表3
水下滑翔机在观测台风作用下海洋中的应用"
| 海域 | 时间 | AUG类型 | 机构 | 台风相关 | 相关文献 |
|---|---|---|---|---|---|
| 西北太平洋 | 2010/9 | Seaglider | 美国华盛顿大学 | 冷尾迹演变 | Mrvaljevic et al, |
| 2012/6 | 美国海军研究生院 | 光学传感器对比 | Chu et al, | ||
| 南海 | 2017 | Petrel-II | 天津大学 | 现场水文数据 | 周磊 等, |
| 北海 | 2014/8 | Slocum | 德国亥姆霍兹研究所 | 生产力 | Schultze et al, |
| 新泽西州 | 2011/8 | Slocum | 美国罗格斯大学 | 强度降低 | Glenn et al, |
| 新泽西州 | 2012/10 | 泥沙再悬浮、输运 | Miles et al, | ||
| 中大西洋湾 | 2009/11 | 沉积物再悬浮 | Miles et al, | ||
| 百慕大 | 2014/10 | 美国伍兹霍尔海洋研究所 | 降水 | Steffen et al, | |
| 墨西哥湾 | 2017 | Spray | 美国伍兹霍尔海洋研究所 | 边界流 | Todd et al, |
| 波多黎各 | 2014/10 | Slocum | 美国迈阿密大学 | 盐度层 | Domingues et al, |
表3
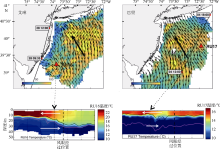
图3
飓风艾琳和巴里风眼经过之前, 高频雷达观测到的表面海流和RU16、RU17水下滑翔机观测到的温度 黑色箭头为观测到的海流方向, 红色三角形为RU16和RU17水下滑翔机位置, 温度图中黑色轮廓线为温跃层, 白色箭头为层流方向。改自Seroka等(2017)"
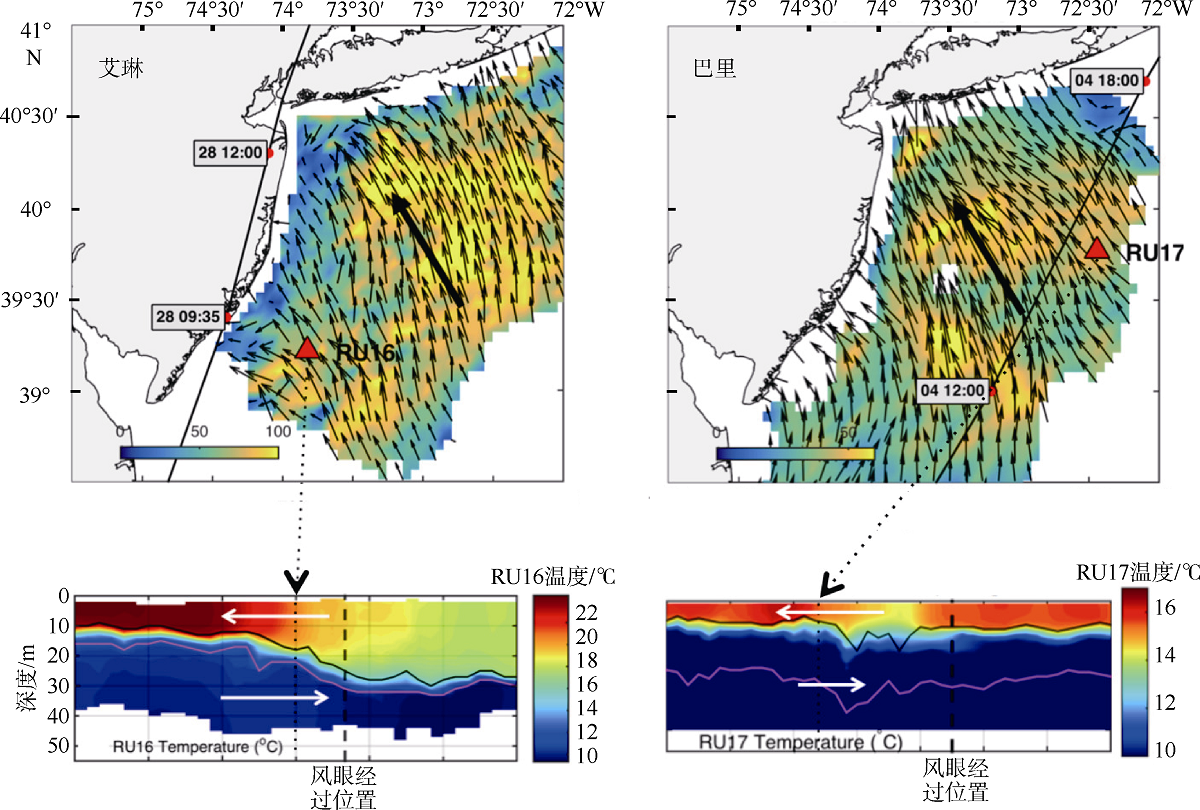
图3
图4
水下滑翔机所获得的温度(a)和位势密度(b)随剖面数深度变化图(改自Ma et al, 2018)"

图4
表4
水下滑翔机在观测内波湍流中的应用"
| 海域 | 时间 | AUG类型 | 机构 | 内波湍流相关 | 相关文献 |
|---|---|---|---|---|---|
| 加拿大海盆冰区 | 2014/7—10 | Seaglider | 美国伍兹霍尔海洋研究所 | 冰盖水域 | Cole et al, |
| 格陵兰海 | 2006/11—2009/11 | 美国华盛顿大学 | 湍流动能耗散 | Beaird et al, | |
| 波弗特海东南部 | 2015/8—9 | Slocum | 加拿大英属哥伦比亚大学 | 强分层对湍流作用 | Scheifele et al, |
| 吕宋海峡 | 2007/4—2008/7 | Spray | 美国斯克里普斯海洋研究所 | 内波频谱 | Rudnick et al, |
| 南海 | 2011/6—8 | 内潮能量通量 | Johnston et al, | ||
| 南海 | 2007 | Spray | 美国华盛顿大学 | 振幅、相位 | Rainville et al, |
| 南海 | 2015/2 | Petrel | 天津大学 | 湍流动能耗散率 | 马伟 等, |
| 2017/7—8 | Petrel-II | 内波特征 | Ma et al, | ||
| 利翁湾 | 2008 | Slocum | 英国南安普顿国家海洋中心 | 内波速度 | Merckelbach et al, |
| 法罗群岛 | 2012/6 | 挪威卑尔根大学 | 湍流动能耗散率 | Fer et al, | |
| 拉布拉多海 | 2004/9—2005/4 | Seaglider | 英国南安普顿国家海洋中心 | 垂直速度方法 | Frajka-Williams et al, |
| 凯尔特海 | 2012/6 | Slocum | 湍流动能耗散率 | Palmer et al, | |
| 墨西哥湾 | 2016/7 | Slocum | 美国斯坦尼斯航天中心海军研究实验室 | 热分层昼间暖层的演化 | Wijesekera et al, |
| 巴哈马群岛 | 2017/11—2018/3 | Seaglider | 英国南安普顿国家海洋学中心和西班牙维戈海洋研究所 | 涡旋内波破碎、湍流耗散 | Fernández-Castro et al, 2020 |
表4
表5
水下滑翔机在观测锋面中的应用"
| 海域 | 时间 | AUG类型 | 机构 | 锋面相关 | 相关文献 |
|---|---|---|---|---|---|
| 南加州 | 2006—2011 | Spray | 美国斯克里普斯海洋研究所 | 浮游动植物 | Powell et al, |
| 日本海 | 2016/4—6 | Seaglider | 日本海洋国家渔业研究所 | 副极地锋和对马暖流 | Wagawa et al, |
| 秘鲁附近 | 2013/1 | Slocum | 德国亥姆霍兹海洋研究中心 | 氧气最小区域流通问题 | Thomsen et al, |
| 墨西哥湾 | 2012/3 | 美国俄勒冈州立大学 | 锋面边缘暖流 | Sanchez-Rios et al, | |
| 巴利阿里海域 | 2007/7、9 | 巴利阿里大学 | 巴利阿里锋 | Ruiz et al, | |
| 南极半岛东部 | 2012/1 | Seaglider | “水下滑翔机: 观察海洋的优秀新工具”项目 | 斜坡锋 | Heywood et al, |
| 南极边缘冰区 | 2018/12— 2019/3 | 瑞典哥德堡大学 | 风锋相互作用 | Swart et al, |
表5
图5
Seaglider水下滑翔机上升下降剖面观测结果 a. 观测区域上层海洋的盐度图; b. 上升下降剖面之间水平距离分布图; c. 上升下降剖面之间的时间分布图。白线为中间值, 改自Swart等(2020)"
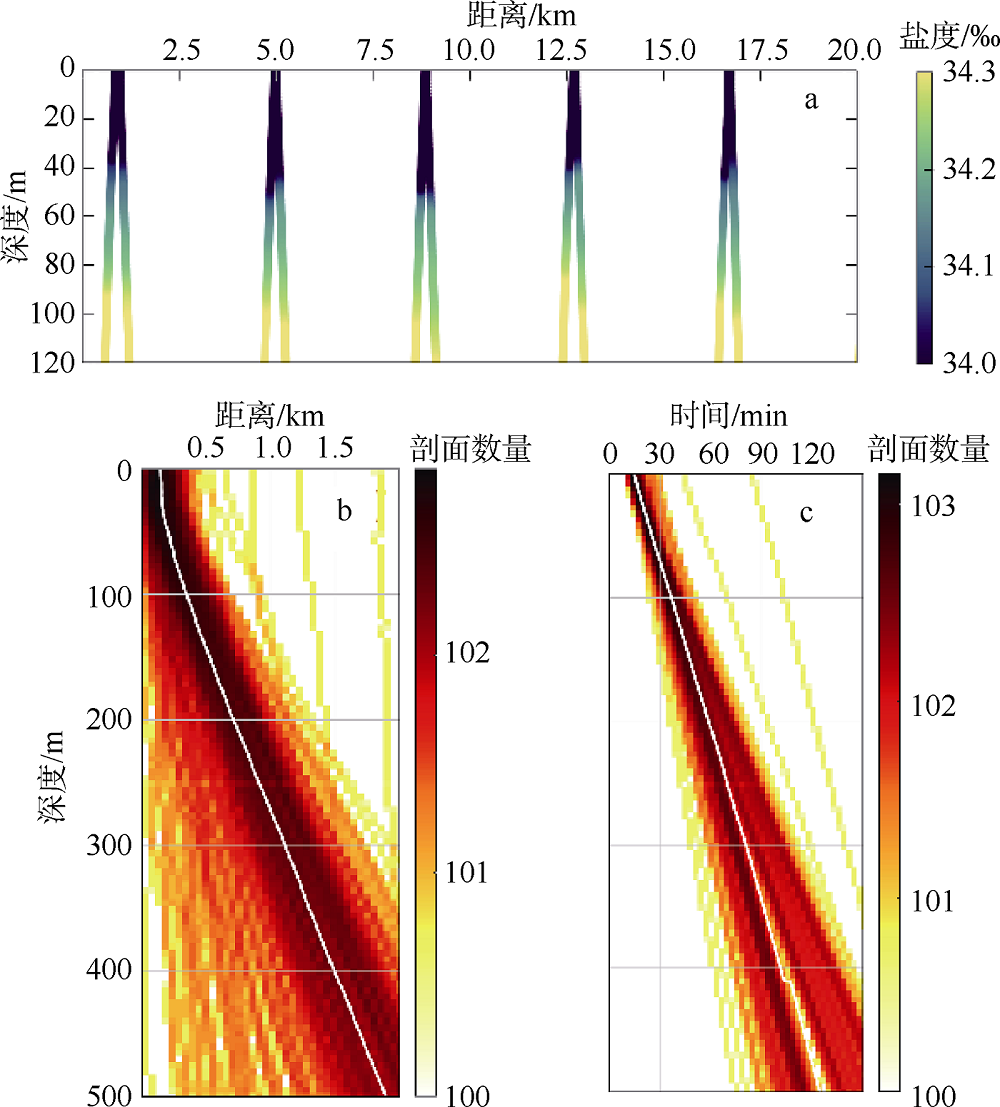
图5
表6
水下滑翔机在观测边界流及部分大洋环流中的应用"
| 海域 | 时间 | AUG类型 | 机构 | 边界流相关 | 相关文献 |
|---|---|---|---|---|---|
| 斯瓦尔巴群岛 | 2018/9—11 | Seaglider | 挪威卑尔根大学地球物理研究所 | 暖大西洋边界流 | Kolås et al, |
| 美国南加州 | 2006—2009 | Spray | 美国斯克里普斯海洋研究所 | 加利福尼亚环流 | Todd et al, |
| 吕宋海峡 | 2012/6—2013/6 | Seaglider | 美国华盛顿大学 | 黑潮 | Lien et al, |
| 菲律宾海 | 2009/6—2014/1 | Spray | 美国斯克里普斯海洋研究所 | 北赤道洋流 | Schönau et al, |
| 菲律宾东岸 | 2009/9—2013/10 | 棉兰老洋流观测项目 | 棉兰老洋流 | Schönau et at, | |
| 所罗门海 | 2007—2010 | Consortium on the Ocean's Role in Climate | 新几内亚海岸潜流 | Davis et al, | |
| 所罗门群岛 | 2005/7—10 | 新喀里多尼亚发展研究所 | 南赤道洋流 | Gourdeau et al, | |
| 秘鲁南部 | 2008/10—11 | Slocum | 法国索邦大学 | 秘鲁上升流 | Pietri et al, |
| 美国北卡罗来纳州附近 | 2004—2009 | Spray | 美国伍兹霍尔海洋研究所 | 墨西哥湾流 | Todd et al, |
| 美国东海岸 | 2004—2020 | 美国麻省理工学院-伍兹霍尔海洋学院海洋学联合项目 | 墨西哥湾流 | Heiderich et al, | |
| 澳大利亚东南部 | 2008—2014 | Slocum | 澳大利亚新南威尔士大学 | 东澳大利亚洋流 | Schaeffer et al, |
| 非洲东南海岸 | 2015/4 | Seaglider | 阿古拉斯大陆架滑翔机实验 | 阿古拉斯洋流 | Krug et al, |
| 罗科尔深海高原 | 2014/6—2016/6 | 苏格兰海洋科学协会 | 北大西洋洋流 | Houpert et al, | |
| 印度洋塞舌尔丹尼斯岛 | 2018/3—6 | Spray | 美国伍兹霍尔海洋研究所 | 赤道环流 | Todd, |
| 加拉帕戈斯群岛西部 | 2013/10—2016/10 | Spray | 美国斯克利普斯海洋学研究所 | 赤道潜流、南赤道洋流 | Rudnick et al, |
| 2013/1—2016/12 | 美国麻省理工学院-伍兹霍尔海洋学院海洋学联合项目 | 赤道洋流系统 | Jakoboski et al, |
表6
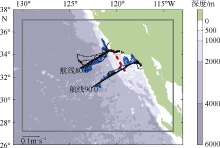
图6
水下滑翔机观测路线深度图(彩色) 黑色线为沿CalCOFI线80.0和90.0的水下滑翔机部署轨迹, 蓝色矢量为上层海洋500m的垂直平均流, 比例向量在左下角给出。红色虚线表示圣罗莎山脊, 它是南加州湾的离岸边界。改自Todd等(2011)"
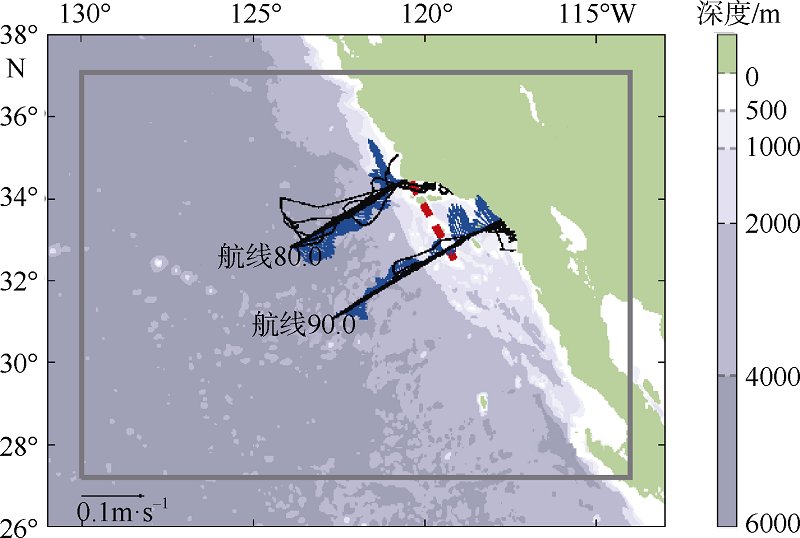
图6
表7
水下滑翔机在观测水质水文中的应用"
| 海域 | 时间 | AUG类型 | 机构 | 水质特征 | 相关文献 |
|---|---|---|---|---|---|
| 南加州海岸 | 2006/9—10 | Spray | 美国斯克里普斯海洋研究所 | 叶绿素 | Todd et al, |
| 南加州中部 | 2010/2—6 | Slocum | 美国宇航局戈达德航天飞行中心 | 浮游植物 | Seegers et al, |
| 澳大利亚东南部 | 2008/7—12 | 悉尼科技大学 | 叶绿素 | Baird et al, | |
| 冰岛南部 | 2008/4 | Seaglider | 美国伍兹霍尔海洋研究所 | 水华 | Mahadevan et al, |
| 北海 | 2013 | 英国东安格利亚大学 | 温盐 | Sheehan et al, | |
| 凯尔特海 | 2015/4 | 英国南安普敦大学 | 硝酸盐 | Vincent et al, | |
| 波克潘深海平原 | 2012—2013 | 英国环境、渔业和水产养殖科学中心 | 水华 | Binetti et al, | |
| 维戈近海 | 2010/6—8 | 英国东安格利亚大学 | 浮游植物 | Rollo et al, | |
| 新泽西州 | 2006/4—9 | Slocum | 美国罗格斯大学 | 温盐季节变化 | Castelao et al, |
| 华盛顿州 | 2003/9—2007/12 | Seaglider | 美国缅因大学 | 水华 | Perry et al, |
| 中大西洋湾 | 2003/10—2004/11 | Slocum | 美国罗格斯大学 | 温盐年际变化 | Castelao et al, |
| 2003/10 | 水华 | Schofield et al, | |||
| 中大西洋湾 | 2006/3—4、2007/7—10 | Spray | 美国伍兹霍尔海洋研究所 | 水平温盐变化 | Todd et al, |
| 中大西洋湾 | 2006—2008 | Slocum | 美国罗格斯大学 | 水华 | Xu et al, |
| 2005 | 浮游植物 | Xu et al, | |||
| 2018/5—2019/11 | 碳酸盐 | Wright et al, | |||
| 大西洋斯科舍陆架 | 2015 | Slocum | 加拿大达尔豪斯大学 | 浮游动物 | Ruckdeschel et al, |
| 亚得里亚海坑 | 2013—2016 | Seaglider、Slocum | 意大利国家海洋和实验地球物理研究所 | 盐度变化 | Kokkini et al, |
| 罗特尼斯岛 | 2009、2010、2011、2015、2016 | Slocum | 西澳大学海洋研究所 | 叶绿素 | Chen et al, |
| 南极威德尔海 | 2012/1—3 | Seaglider | 英国东安格利亚大学 | 生产力 | Biddle et al, |
| 北极白令海 | 2019/9 | Petrel | 天津大学 | 温度、溶解氧 | 杨绍琼 等, |
表7

图7
在两种不同的混合层深度(白线)下Fv′/Fm′(光合效率)、Fm′(代表浮游植物生物量)和温度的平均日循环 圆点为FIRe水下滑翔机实际观测值。改自Carvalho等(2016)"
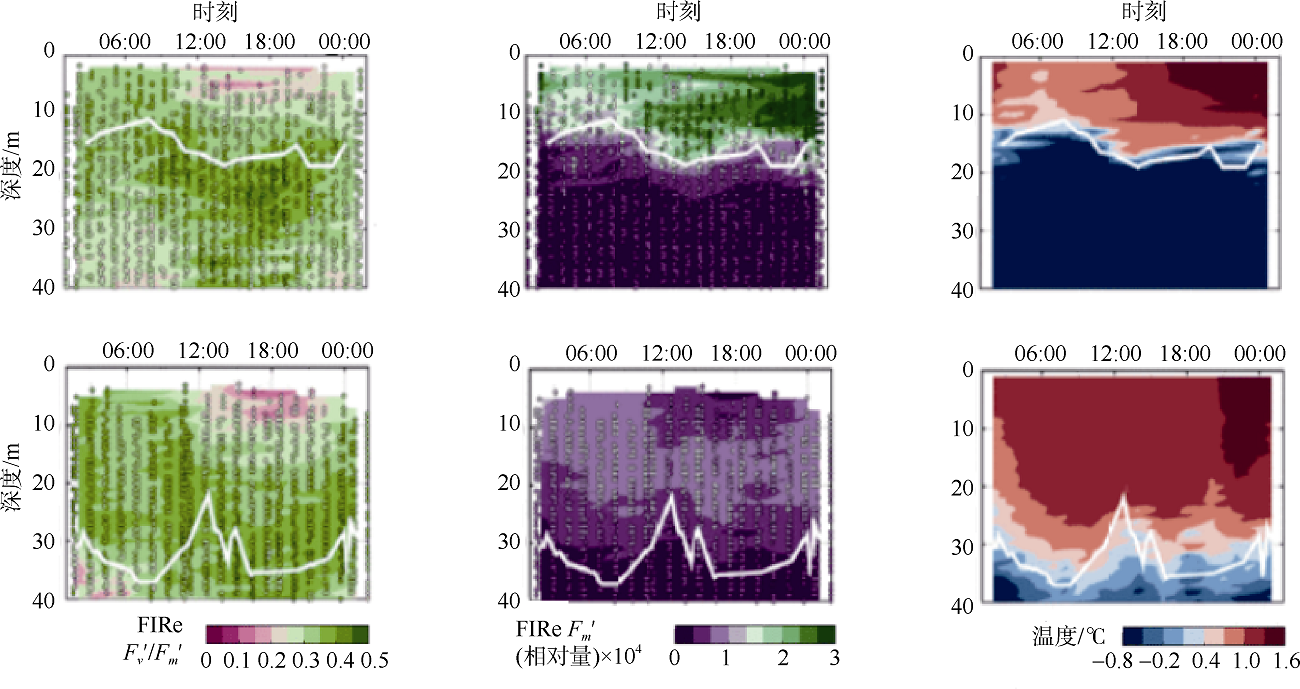
图7
表8
水下滑翔机在声学方面的应用"
| 海域 | 时间 | AUG类型 | 机构 | 声学相关 | 相关文献 |
|---|---|---|---|---|---|
| 罗弗顿群岛 | 2018/3—5 | Seaglider | 挪威特罗姆瑟大学 | 座头鲸、抹香鲸、海豚 | Aniceto et al, |
| 加州蒙特利近海 | 2006/8 | 美国阿拉斯加渔业科学中心 | 蓝鲸、座头鲸、抹香鲸 | Moore et al, | |
| 夏威夷西海岸 | 2009/10—11 | 美国国家海洋大气局太平洋海洋环境实验室 | 喙鲸 | Klinck et al, | |
| 韩国浦项 | 2017/11 | Slocum | 韩国西江大学 | 地震声音 | Lee et al, |
| 马里亚纳海沟 | 2018/4 | Petrel-II | 浙江大学 | 减少自噪声算法 | Jiang et al, |
| 南海 | 2018/8 | ||||
| 南海 | 2016/8 | Petrel-Ⅱ | 中国科学院声学研究所 | 南海水下噪声谱图 | Liu et al, |
| 劳盆地 | 2010/5 | Slocum | 美国俄勒冈州立大学 | 海底火山活动化学水声特征 | Matsumoto et al, |
| 新南威尔士州 | 2009/5 | 澳大利亚新南威尔士州国防科学与技术机构 | 海豚 | Ferguson et al, | |
| 美国 缅因州 | 2005/5 | Slocum | 美国伍兹霍尔海洋研究所 | 塞鲸、北尾长鲸 | Baumgartner et al, |
| 2015、2016 | 须鲸、长须鲸、鳕鲸和北大西洋露脊鲸 | Baumgartner et al, | |||
| 西佛罗里达 | 2009/7 | Slocum | 美国南佛罗里达大学 | 红色石斑鱼、蟾蜍、未知生物 | Wall et al, |
| 地中海 | 2017/9—10 | SeaExplorer | 比利时功能和进化形态学实验室 | 10种鱼类声音 | Bolgan et al, |
| 南极半岛东部 | 2012/1 | Seaglider | 英国剑桥南极考察 | 南极磷虾 | Guihen et al, |
表8
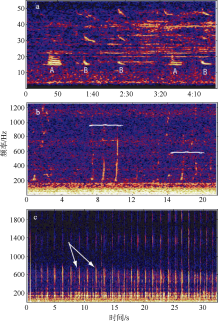
图8
分别是水下滑翔机收集的蓝鲸(a)、座头鲸(b)和抹香鲸(c)的声音频率(改自Moore et al, 2007)"

图8
| [1] | 蔡树群, 何建玲, 谢皆烁, 2011. 近10年来南海孤立内波的研究进展[J]. 地球科学进展, 26(7): 703-710. |
| CAI SHUQUN, HE JIANLING, XIE JIESHUO, 2011. Recent decadal progress of the study on internal solitons in the South China sea[J]. Advances in Earth Science, 26(7): 703-710. (in Chinese with English abstract) | |
| [2] | 陈刚, 张云海, 赵加鹏, 2014. 基于混合模型的水下滑翔机最佳升阻比特性[J]. 四川兵工学报, 35(2): 150-152. |
| CHEN GANG, ZHANG YUNHAI, ZHAO JIAPENG, 2014. Optimum lift-drag ratio of the underwater glider based on mixture models[J]. Journal of Sichuan Ordnance, 35(2): 150-152. (in Chinese with English abstract) | |
| [3] | 李健, 李梦春, 翁震平, 等, 2019. 水下物流概念、模式及未来发展研究[J]. 指挥与控制学报, 5(3): 209-214. |
| LI JIAN, LI MENGCHUN, WENG ZHENPING, et al, 2019. Underwater logistics: concepts, model and future development[J]. Journal of Command and Control, 5(3): 209-214. (in Chinese with English abstract) | |
| [4] | 刘方, 2014. 混合驱动水下滑翔机系统设计与运动行为研究[D]. 天津: 天津大学: 32-166. |
| LIU FANG, 2014. System design and motion behaviors analysis of the hybrid underwater glider[D]. Tianjin: Tianjin University: 32-166. (in Chinese with English abstract) | |
| [5] | 马伟, 王延辉, 徐田雨, 2017. 微结构湍流测量水下滑翔机设计与试验研究[J]. 机械工程学报, 53(9): 22-29. |
| MA WEI, WANG YANHUI, XU TIANYU, 2017. Design and sea trials of the underwater glider for micro-structure turbulence measurement[J]. Journal of Mechanical Engineering, 53(9): 22-29. (in Chinese with English abstract) | |
| [6] | 倪园芳, 马捷, 王俊雄, 2008. 水下滑翔机浮力系统的机理和调节性能[J]. 船海工程, 37(1): 95-99. |
| NI YUANFANG, MA JIE, WANG JUNXIONG, 2008. Mechanism and adjusting performance of the thermal glider's buoyancy adjusting system[J]. Ship & Ocean Engineering, 37(1): 95-99. (in Chinese with English abstract) | |
| [7] | 钱洪宝, 卢晓亭, 2019. 我国水下滑翔机技术发展建议与思考[J]. 水下无人系统学报, 27(5): 474-479. |
| QIAN HONGBAO, LU XIAOTING, 2019. Technical development of underwater glider in China: suggestions and thoughts[J]. Journal of Unmanned Undersea Systems, 27(5): 474-479. (in Chinese with English abstract) | |
| [8] | 秦玉峰, 张选明, 孙秀军, 等, 2016. 混合驱动水下滑翔机高效推进螺旋桨设计[J]. 海洋技术学报, 35(3): 40-45. |
| QIN YUFENG, ZHANG XUANMING, SUN XIUJUN, et al, 2016. Design of a high-efficiency propeller for hybrid drive underwater gliders[J]. Journal of Ocean Technology, 35(3): 40-45. (in Chinese with English abstract) | |
| [9] | 任杰, 2019. 海洋观测技术[M]. 广州: 中山大学出版社. |
| REN JIE, 2019. Marine observation techniques[M]. Guangzhou: Zhongshan University Press. (in Chinese) | |
| [10] | 沈新蕊, 王延辉, 杨绍琼, 等, 2018. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 26(2): 89-106. |
| SHEN XINRUI, WANG YANHUI, YANG SHAOQIONG, et al, 2018. Development of underwater gliders: an overview and prospect[J]. Journal of Unmanned Undersea Systems, 26(2): 89-106. (in Chinese with English abstract) | |
| [11] | 田文龙, 宋保维, 刘郑国, 2013. 可控翼混合驱动水下滑翔机运动性能研究[J]. 西北工业大学学报, 31(1): 122-128. |
| TIAN WENLONG, SONG BAOWEI, LIU ZHENGGUO, 2013. Motion characteristic analysis of a hybrid-driven underwater glider with independently controllable wings[J]. Journal of Northwestern Polytechnical University, 31(1): 122-128. (in Chinese with English abstract) | |
| [12] | 王超, 孙芹东, 王文龙, 等, 2018. 水下目标警戒滑翔机声学系统设计与实现[C]// 2018年鲁浙苏黑四省声学技术学术交流会论文集. 青岛: 《声学技术》编辑部: 4 |
| WANG CHAO, SUN QINDONG, WANG WENLONG, et al, 2018. Acoustic system design and implementation for underwater target warning glider[C]// 2018. Qingdao: Editorial Department of Acoustic Technology: 4. (in Chinese with English abstract) | |
| [13] | 王树新, 李晓平, 王延辉, 等, 2005. 水下滑翔器的运动建模与分析[J]. 海洋技术, 24(1): 5-9. |
| WANG SHUXIN, LI XIAOPING, WANG YANHUI, et al, 2005. Dynamic modeling and analysis of underwater gliders[J]. Ocean Technology, 24(1): 5-9. (in Chinese with English abstract) | |
| [14] | 王树新, 王延辉, 张大涛, 等, 2006. 温差能驱动的水下滑翔器设计与实验研究[J]. 海洋技术, 25(1): 1-5. |
| WANG SHUXIN, WANG YANHUI, ZHANG DATAO, et al, 2006. Design and trial on an underwater glider propelled by thermal engine[J]. Ocean Technology, 25(1): 1-5. (in Chinese with English abstract) | |
| [15] | 王文龙, 王超, 韩梅, 等, 2019. 矢量水听器在水下滑翔机上的应用研究[J]. 兵工学报, 40(12): 2580-2586. |
| WANG WENLONG, WANG CHAO, HAN MEI, et al, 2019. Research on application of vector hydrophone onboard an underwater glider[J]. Acta Armamentarii, 40(12): 2580-2586. (in Chinese with English abstract) | |
| [16] | 吴立新, 陈朝晖, 2013. 物理海洋观测研究的进展与挑战[J]. 地球科学进展, 28(05): 542-551. |
| WU LIXIN, CHEN CHAOHUI, 2013. Progresses and Challenges in Observational Studies of Physical Oceanography 28( 05): 542-551. (in Chinese with English abstract) | |
| [17] | 吴立新, 陈朝晖, 林霄沛, 等, 2020. “透明海洋”立体观测网构建[J]. 科学通报, 65(25): 2654-2661. |
| WU LIXIN, CHEN CHAOHUI, LIN XIAOPEI, et al, 2020. Building the integrated observational network of “Transparent Ocean”[J]. Chinese Science Bulletin, 65(25): 2654-2661. (in Chinese with English abstract) | |
| [18] | 薛冬阳, 2017. 水下滑翔机编队协调控制与不确定性研究[D]. 天津: 天津大学. |
| XUE DONGYANG, 2017. Research on coordinate control and uncertainty analysis for underwater glider formation[D]. Tianjin: Tianjin University. (in Chinese with English abstract) | |
| [19] | 杨绍琼, 李逸铭, 陈红霞, 等, 2021. 基于水下滑翔机观测数据的白令海海盆区域温度及溶解氧特征分析[J]. 海洋科学进展, 39(3): 355-363. |
| YANG SHAOQIONG, LI YIMING, CHEN HONGXIA, et al, 2021. Characteristic analysis on temperature and dissolved oxygen in the Bering sea based on underwater glider observation data[J]. Advances in Marine Science, 39(3): 355-363. (in Chinese with English abstract) | |
| [20] | 易镇辉, 俞建成, 毛华斌, 等, 2019. 一种水下滑翔机盐度数据的噪声处理方法[J]. 水下无人系统学报, 27(5): 503-513. |
| YI ZHENHUI, YU JIANCHENG, MAO HUABIN, et al, 2019. A noise processing method for salinity data underwater glider[J]. Journal of Unmanned Undersea Systems, 27(5): 503-513. (in Chinese with English abstract) | |
| [21] | 张润锋, 杨绍琼, 牛文栋, 等, 2020. 强扰动环境下水下滑翔机编队稳定性分析[J]. 舰船科学技术, 42(12): 67-71. |
| ZHANG RUNFENG, YANG SHAOQIONG, NIU WENDONG, et al, 2020. Stability analysis of underwater glider fleet under strong disturbance[J]. Ship Science and Technology, 42(12): 67-71. (in Chinese with English abstract) | |
| [22] | 周磊, 陈大可, 雷小途, 等, 2019. 海洋与台风相互作用研究进展[J]. 科学通报, 64(1): 60-72. |
| ZHOU LEI, CHEN DAKE, LEI XIAOTU, et al, 2019. Progress and perspective on interactions between ocean and typhoon[J]. Chinese Science Bulletin, 64(1): 60-72. (in Chinese with English abstract) | |
| [23] | 邹达明, 2019. 喷水推进型长航程水下滑翔机耐压壳体优化研究[D]. 武汉: 华中科技大学: 3-5. |
| ZOU DAMING, 2019. Research on optimization design of pressure hull of water-jet long distance underwater glider[D]. Wuhan: Huazhong University of Science & Technology: 3-5. (in Chinese with English abstract) | |
| [24] | ALFORD M H, PEACOCK T, MACKINNON J A, et al, 2015. Correction: Corrigendum: the formation and fate of internal waves in the South China Sea[J]. Nature, 528(7580): 152. |
| [25] |
ANICETO A S, PEDERSEN G, PRIMICERIO R, et al, 2020. Arctic marine data collection using oceanic gliders: providing ecological context to cetacean vocalizations[J]. Frontiers in Marine Science, 7: 585754.
doi: 10.3389/fmars.2020.585754 |
| [26] |
BAIRD M E, SUTHERS I M, GRIFFIN D A, et al, 2011. The effect of surface flooding on the physical-biogeochemical dynamics of a warm-core eddy off southeast Australia[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 58(5): 592-605.
doi: 10.1016/j.dsr2.2010.10.002 |
| [27] | BAIRD M E, RIDGWAY K R, 2012. The southward transport of sub-mesoscale lenses of Bass Strait Water in the centre of anti-cyclonic mesoscale eddies[J]. Geophysical Research Letters, 39(2): L02603. |
| [28] |
BAUMGARTNER M F, FRATANTONI D M, 2008. Diel periodicity in both sei whale vocalization rates and the vertical migration of their copepod prey observed from ocean gliders[J]. Limnology and Oceanography, 53(5): 2197-2209.
doi: 10.4319/lo.2008.53.5_part_2.2197 |
| [29] |
BAUMGARTNER M F, BONNELL J, CORKERON P J, et al, 2020. Slocum gliders provide accurate near real-time estimates of baleen whale presence from human-reviewed passive acoustic detection information[J]. Frontiers in Marine Science, 7: 100.
doi: 10.3389/fmars.2020.00100 |
| [30] |
BEAIRD N, FER I, RHINES P, et al, 2012. Dissipation of turbulent kinetic energy inferred from seagliders: an application to the eastern Nordic seas overflows[J]. Journal of Physical Oceanography, 42(12): 2268-2282.
doi: 10.1175/JPO-D-12-094.1 |
| [31] |
BIDDLE L C, KAISER J, HEYWOOD K J, et al, 2015. Ocean glider observations of iceberg-enhanced biological production in the northwestern Weddell Sea[J]. Geophysical Research Letters, 42(2): 459-465.
doi: 10.1002/2014GL062850 |
| [32] |
BINETTI U, KAISER J, DAMERELL G M, et al, 2020. Net community oxygen production derived from Seaglider deployments at the Porcupine Abyssal Plain site (PAP; northeast Atlantic) in 2012-13[J]. Progress in Oceanography, 183: 102293.
doi: 10.1016/j.pocean.2020.102293 |
| [33] |
BOLGAN M, GERVAISE C, DI IORIO L, et al, 2020. Fish biophony in a Mediterranean submarine canyon[J]. The Journal of the Acoustical Society of America, 147(4): 2466-2477.
doi: 10.1121/10.0001101 |
| [34] |
BOSSE A, TESTOR P, MAYOT N, et al, 2017. A submesoscale coherent vortex in the Ligurian Sea: from dynamical barriers to biological implications[J]. Journal of Geophysical Research: Oceans, 122(8): 6196-6217.
doi: 10.1002/2016JC012634 |
| [35] | BOUFFARD J, PASCUAL A, RUIZ S, et al, 2010. Coastal and mesoscale dynamics characterization using altimetry and gliders: a case study in the Balearic Sea[J]. Journal of Geophysical Research: Oceans, 115(C10): C10029. |
| [36] |
BRUN A A, RAMIREZ N, PIZARRO O, et al, 2020. The role of the Magellan Strait on the southwest South Atlantic shelf[J]. Estuarine, Coastal and Shelf Science, 237: 106661.
doi: 10.1016/j.ecss.2020.106661 |
| [37] | CARVALHO F, KOHUT J, GORBUNOV M, et al, 2016. Mapping Antarctic phytoplankton physiology using autonomous gliders[C]// Proceedings of the OCEANS 2016 MTS/IEEE Monterey. Monterey: IEEE: 1-6. |
| [38] | CASTELAO R, GLENN S, SCHOFIELD O, et al, 2008a. Seasonal evolution of hydrographic fields in the central Middle Atlantic Bight from glider observations[J]. Geophysical Research Letters, 35(3): L03617. |
| [39] | CASTELAO R, SCHOFIELD O, GLENN S, et al, 2008b. Cross-shelf transport of freshwater on the New Jersey shelf[J]. Journal of Geophysical Research: Oceans, 113(C7): C07017. |
| [40] |
CHEN MIAOJU, PATTIARATCHI C B, GHADOUANI A, et al, 2020. Influence of storm events on chlorophyll distribution along the oligotrophic continental shelf off south-western Australia[J]. Frontiers in Marine Science, 7: 287.
doi: 10.3389/fmars.2020.00287 |
| [41] | CHU P C, FAN CHENWU, 2019. Underwater optical detection after passage of tropical storm[J]. Journal of Applied Remote Sensing, 13(4): 047502. |
| [42] |
COLE S T, TOOLE J M, RAINVILLE L, et al, 2018. Internal waves in the arctic: influence of ice concentration, ice roughness, and surface layer stratification[J]. Journal of Geophysical Research: Oceans, 123(8): 5571-5586.
doi: 10.1029/2018JC014096 |
| [43] |
COTRONEO Y, AULICINO G, RUIZ S, et al, 2016. Glider and satellite high resolution monitoring of a mesoscale eddy in the Algerian basin: effects on the mixed layer depth and biochemistry[J]. Journal of Marine Systems, 162: 73-88.
doi: 10.1016/j.jmarsys.2015.12.004 |
| [44] |
DAVIS R E, KESSLER W S, SHERMAN J T, 2012. Gliders measure western boundary current transport from the South Pacific to the equator[J]. Journal of Physical Oceanography, 42(11): 2001-2013.
doi: 10.1175/JPO-D-12-022.1 |
| [45] |
DE MADRON X D, RAMONDENC S, BERLINE L, et al, 2017. Deep sediment resuspension and thick nepheloid layer generation by open-ocean convection[J]. Journal of Geophysical Research: Oceans, 122(3): 2291-2318.
doi: 10.1002/2016JC012062 |
| [46] |
DOMINGUES R, GONI G, BRINGAS F, et al, 2015. Upper ocean response to Hurricane Gonzalo (2014): salinity effects revealed by targeted and sustained underwater glider observations[J]. Geophysical Research Letters, 42(17): 7131-7138.
doi: 10.1002/2015GL065378 |
| [47] |
FAN XUE, SEND U, TESTOR P, et al, 2013. Observations of irminger sea anticyclonic eddies[J]. Journal of Physical Oceanography, 43(4): 805-823.
doi: 10.1175/JPO-D-11-0155.1 |
| [48] |
FER I, PETERSON A K, ULLGREN J E, 2014. Microstructure measurements from an underwater glider in the turbulent Faroe bank channel overflow[J]. Journal of Atmospheric and Oceanic Technology, 31(5): 1128-1150.
doi: 10.1175/JTECH-D-13-00221.1 |
| [49] | FERGUSON B G, LO K W, RODGERS J D, 2010. Sensing the underwater acoustic environment with a single hydrophone onboard an undersea glider[C]// Proceedings of the OCEANS' 10 IEEE SYDNEY. Sydney: IEEE: 1-5. |
| [50] |
FERNÁNDEZ-CASTRO B, EVANS D G, FRAJKA-WILLIAMS E, et al, 2020. Breaking of internal waves and turbulent dissipation in an anticyclonic mode water eddy[J]. Journal of Physical Oceanography, 50(7): 1893-1914.
doi: 10.1175/JPO-D-19-0168.1 |
| [51] |
FRAJKA-WILLIAMS E, ERIKSEN C C, RHINES P B, et al, 2011. Determining vertical water velocities from seaglider[J]. Journal of Atmospheric and Oceanic Technology, 28(12): 1641-1656.
doi: 10.1175/2011JTECHO830.1 |
| [52] |
FRAJKA-WILLIAMS E, RHINES P B, ERIKSEN C C, 2014. Horizontal stratification during deep convection in the Labrador sea[J]. Journal of Physical Oceanography, 44(1): 220-228.
doi: 10.1175/JPO-D-13-069.1 |
| [53] |
GLENN S M, MILES T N, SEROKA G N, et al, 2016. Stratified coastal ocean interactions with tropical cyclones[J]. Nature Communications, 7: 10887.
doi: 10.1038/ncomms10887 |
| [54] |
GOURDEAU L, KESSLER W S, DAVIS R E, et al, 2008. Zonal jets entering the coral sea[J]. Journal of Physical Oceanography, 38(3): 715-725.
doi: 10.1175/2007JPO3780.1 |
| [55] |
GUIHEN D, FIELDING S, MURPHY E J, et al, 2014. An assessment of the use of ocean gliders to undertake acoustic measurements of zooplankton: the distribution and density of Antarctic krill (Euphausia superba) in the Weddell Sea[J]. Limnology and Oceanography: Methods, 12(6): 373-389.
doi: 10.4319/lom.2014.12.373 |
| [56] |
HARLAN J A, TERRILL E J, HAZARD L, et al, 2010. The Integrated Ocean Observing System High-Frequency Radar Network: Status and Local, Regional, and National Applications[J]. Marine Technology Society Journal, 44: 122-132.
doi: 10.4031/MTSJ.44.6.6 |
| [57] |
HÁTÚN H, ERIKSEN C C, RHINES P B, 2007. Buoyant Eddies entering the Labrador sea observed with gliders and altimetry[J]. Journal of Physical Oceanography, 37(12): 2838-2854.
doi: 10.1175/2007JPO3567.1 |
| [58] |
HEIDERICH J, TODD R E, 2020. Along-stream evolution of gulf stream volume transport[J]. Journal of Physical Oceanography, 50(8): 2251-2270.
doi: 10.1175/JPO-D-19-0303.1 |
| [59] | HEYWOOD K J, SCHMIDTKO S, HEUZÉ C, et al, 2014. Ocean processes at the Antarctic continental slope[J]. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 372(2019): 20130047. |
| [60] | HODGES B A, FRATANTONI D M, 2009. A thin layer of phytoplankton observed in the Philippine Sea with a synthetic moored array of autonomous gliders[J]. Journal of Geophysical Research: Oceans, 114(C10): C10020. |
| [61] |
HOUPERT L, INALL M E, DUMONT E, et al, 2018. Structure and transport of the North Atlantic current in the eastern subpolar gyre from sustained glider observations[J]. Journal of Geophysical Research: Oceans, 123(8): 6019-6038.
doi: 10.1029/2018JC014162 |
| [62] |
HRISTOVA H G, KESSLER W S, MCWILLIAMS J C, et al, 2014. Mesoscale variability and its seasonality in the Solomon and Coral Seas[J]. Journal of Geophysical Research: Oceans, 119(7): 4669-4687.
doi: 10.1002/2013JC009741 |
| [63] |
HSU P C, HO C R, 2019. Typhoon-induced ocean subsurface variations from glider data in the Kuroshio region adjacent to Taiwan[J]. Journal of Oceanography, 75(1): 1-21.
doi: 10.1007/s10872-018-0480-2 |
| [64] |
JAKOBOSKI J, TODD R E, OWENS W B, et al, 2020. Bifurcation and upwelling of the equatorial undercurrent west of the Galápagos archipelago[J]. Journal of Physical Oceanography, 50(4): 887-905.
doi: 10.1175/JPO-D-19-0110.1 |
| [65] |
JIANG CHENG, LI JIANLONG, XU WEN, 2019. The use of underwater gliders as acoustic sensing platforms[J]. Applied Sciences, 9(22): 4839.
doi: 10.3390/app9224839 |
| [66] |
JIANG CHENG, LI JIANLONG, XU WEN, et al, 2021. Improvement of the position estimation for underwater gliders with a passive acoustic method[J]. IEEE Journal of Oceanic Engineering, 46(4): 1165-1178.
doi: 10.1109/JOE.2021.3085096 |
| [67] |
JIN ZHIGANG, WANG NING, SU YISHAN, et al, 2018. A glider-assisted link disruption restoration mechanism in underwater acoustic sensor networks[J]. Sensors, 18(2): 501.
doi: 10.3390/s18020501 |
| [68] |
JOHNSTON T M S, RUDNICK D L, ALFORD M H, et al, 2013. Internal tidal energy fluxes in the South China Sea from density and velocity measurements by gliders[J]. Journal of Geophysical Research: Oceans, 118(8): 3939-3949.
doi: 10.1002/jgrc.20311 |
| [69] | JONES C, ALLSUP B, DECOLLIBUS C, 2014. Slocum glider: expanding our understanding of the oceans[C]// Proceedings of 2014 Oceans - St. John's. St. John's: IEEE: 1-10. |
| [70] |
KLINCK H, MELLINGER D K, KLINCK K, et al, 2012. Near-real-time acoustic monitoring of beaked whales and other cetaceans using a seagliderTM[J]. PLoS One, 7(5): e36128.
doi: 10.1371/journal.pone.0036128 |
| [71] |
KOKKINI Z, MAURI E, GERIN R, et al, 2020. On the salinity structure in the South Adriatic as derived from float and glider observations in 2013-2016[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 171: 104625.
doi: 10.1016/j.dsr2.2019.07.013 |
| [72] | KOLÅS E H, KOENIG Z, FER I, et al, 2020. Structure and transport of Atlantic water North of Svalbard from observations in summer and fall 2018[J]. Journal of Geophysical Research: Oceans, 125(9): e2020JC016174. |
| [73] |
KRUG M, SWART S, GULA J, 2017. Submesoscale cyclones in the Agulhas current[J]. Geophysical Research Letters, 44(1): 346-354.
doi: 10.1002/2016GL071006 |
| [74] | LADD C, BELL S W, KIMMEL D G, et al, 2020. Eddy-like features near St. Matthew island, eastern Bering sea shelf: observations from the oculus coastal glider[J]. Geophysical Research Letters, 47(23): e2020GL089873. |
| [75] |
LEE J H, KO S H, JUNG S K, et al, 2019. Tertiary waves measured during 2017 Pohang earthquake using an underwater glider[J]. Applied Sciences, 9(18): 3860.
doi: 10.3390/app9183860 |
| [76] | LI SHUFENG, WANG SHUXIN, ZHANG FUMIN, et al, 2018. Observing an anticyclonic eddy in the South China Sea using multiple underwater gliders[C]. OCEANS 2018 MTS/IEEE Charleston 22-25 Oct. 2018. |
| [77] |
LI SHUFENG, WANG SHUXIN, ZHANG FUMIN, et al, 2019. Constructing the three-dimensional structure of an anticyclonic eddy in the South China Sea using multiple underwater gliders[J]. Journal of Atmospheric and Oceanic Technology, 36(12): 2449-2470.
doi: 10.1175/JTECH-D-19-0006.1 |
| [78] |
LI SHUFENG, ZHANG FUMIN, WANG SHUXIN, et al, 2020. Constructing the three-dimensional structure of an anticyclonic eddy with the optimal configuration of an underwater glider network[J]. Applied Ocean Research, 95: 101893.
doi: 10.1016/j.apor.2019.101893 |
| [79] |
LIEN R C, MA B, CHENG Y H, et al, 2014. Modulation of Kuroshio transport by mesoscale eddies at the Luzon Strait entrance[J]. Journal of Geophysical Research: Oceans, 119(4): 2129-2142.
doi: 10.1002/2013JC009548 |
| [80] |
LIU LU, XIAO LING, LAN SHIQUAN, et al, 2018. Using petrel ii glider to analyze underwater noise spectrogram in the South China Sea[J]. Acoustics Australia, 46(1): 151-158.
doi: 10.1007/s40857-018-0126-y |
| [81] |
LIU ZENGHONG, CHEN XINGRONG, YU JIANCHENG, et al, 2019. Kuroshio intrusion into the South China Sea with an anticyclonic eddy: evidence from underwater glider observation[J]. Journal of Oceanology and Limnology, 37(5): 1469-1480.
doi: 10.1007/s00343-019-8290-y |
| [82] | MA WEI, WANG YANHUI, YANG SHAOQIONG, et al, 2018. Observation of internal solitary waves using an underwater glider in the northern South China Sea[J]. Journal of Coastal Research, 34(5): 1188-1195. |
| [83] |
MAHADEVAN A, D'ASARO E, LEE C, et al, 2012. Eddy-driven stratification initiates North Atlantic spring phytoplankton blooms[J]. Science, 337(6090): 54-58.
doi: 10.1126/science.1218740 |
| [84] | MARTIN J P, LEE C M, ERIKSEN C C, et al, 2009. Glider observations of Kinematics in a Gulf of Alaska eddy[J]. Journal of Geophysical Research: Oceans, 114(C12): C12021. |
| [85] | MATSUMOTO H, STALIN S E, EMBLEY R W, et al, 2010. Hydroacoustics of a submarine eruption in the Northeast Lau Basin using an acoustic glider[C]// Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE. Seattle: IEEE: 1-6. |
| [86] |
MERCKELBACH L, SMEED D, GRIFFITHS G, 2010. Vertical water velocities from underwater gliders[J]. Journal of Atmospheric and Oceanic Technology, 27(3): 547-563.
doi: 10.1175/2009JTECHO710.1 |
| [87] | MILES T, GLENN S M, SCHOFIELD O, 2013. Temporal and spatial variability in fall storm induced sediment resuspension on the Mid-Atlantic Bight[J]. Continental Shelf Research, 63 Suppl 1: S36-S49. |
| [88] |
MILES T, SEROKA G, KOHUT J, et al, 2015. Glider observations and modeling of sediment transport in Hurricane Sandy[J]. Journal of Geophysical Research: Oceans, 120(3): 1771-1791.
doi: 10.1002/2014JC010474 |
| [89] | MOORE S E, HOWE B M, STAFFORD K M, et al, 2007. Including whale call detection in standard ocean measurements: application of acoustic seagliders[J]. Marine Technology Society Journal, 41(4): 53-57. |
| [90] |
MRVALJEVIC R K, BLACK P G, CENTURIONI L R, et al, 2013. Observations of the cold wake of Typhoon Fanapi (2010)[J]. Geophysical Research Letters, 40(2): 316-321.
doi: 10.1029/2012GL054282 |
| [91] |
NICHOLSON D, EMERSON S, ERIKSEN C C, 2008. Net community production in the deep euphotic zone of the subtropical North Pacific gyre from glider surveys[J]. Limnology and Oceanography, 53(5): 2226-2236.
doi: 10.4319/lo.2008.53.5_part_2.2226 |
| [92] |
OKE P R, SAKOV P, SCHULZ E, 2009. A comparison of shelf observation platforms for assimilation in an eddy-resolving ocean model[J]. Dynamics of Atmospheres and Oceans, 48(1-3): 121-142.
doi: 10.1016/j.dynatmoce.2009.04.002 |
| [93] |
PALMER M R, STEPHENSON G R, INALL M E, et al, 2015. Turbulence and mixing by internal waves in the Celtic Sea determined from ocean glider microstructure measurements[J]. Journal of Marine Systems, 144: 57-69.
doi: 10.1016/j.jmarsys.2014.11.005 |
| [94] |
PELLAND N A, ERIKSEN C C, LEE C M, 2013. Subthermocline eddies over the Washington continental slope as observed by seagliders, 2003-09[J]. Journal of Physical Oceanography, 43(10): 2025-2053.
doi: 10.1175/JPO-D-12-086.1 |
| [95] |
PERRY M J, SACKMANN B S, ERIKSEN C C, et al, 2008. Seaglider observations of blooms and subsurface chlorophyll maxima off the Washington coast[J]. Limnology and Oceanography, 53(5): 2169-2179.
doi: 10.4319/lo.2008.53.5_part_2.2169 |
| [96] |
PIETRI A, TESTOR P, ECHEVIN V, et al, 2013. Finescale vertical structure of the upwelling system off southern Peru as observed from glider data[J]. Journal of Physical Oceanography, 43(3): 631-646.
doi: 10.1175/JPO-D-12-035.1 |
| [97] | PORTER M, HENLEY S F, ORKNEY A, et al, 2020. A polar surface eddy obscured by thermal stratification[J]. Geophysical Research Letters, 47(6): e2019GL086281. |
| [98] |
POULAIN P M, MAURI E, GERIN R, et al, 2020. On the dynamics in the southeastern Ligurian Sea in summer 2010[J]. Continental Shelf Research, 196: 104083.
doi: 10.1016/j.csr.2020.104083 |
| [99] |
POWELL J R, OHMAN M D, 2015. Covariability of zooplankton gradients with glider-detected density fronts in the Southern California Current System[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 112: 79-90.
doi: 10.1016/j.dsr2.2014.04.002 |
| [100] | QI YONGFENG, SHANG CHENJING, MAO HUABIN, et al, 2020. Spatial structure of turbulent mixing of an anticyclonic mesoscale eddy in the northern South China Sea[J]. Acta Oceanologica Sinica, 39(11): 69-81. |
| [101] |
QIU CHUNHUA, MAO HUABIN, WANG YANHUI, et al, 2019. An irregularly shaped warm eddy observed by Chinese underwater gliders[J]. Journal of Oceanography, 75(2): 139-148.
doi: 10.1007/s10872-018-0490-0 |
| [102] | QIU CHUNHUA, OUYANG JUAN, YU JIANCHENG, et al, 2020. Variations of mesoscale eddy SST fronts based on an automatic detection method in the northern South China Sea[J]. Acta Oceanologica Sinica, 39(11): 82-90. |
| [103] |
RAINVILLE L, LEE C M, RUDNICK D L, et al, 2013. Propagation of internal tides generated near Luzon Strait: observations from autonomous gliders[J]. Journal of Geophysical Research: Oceans, 118(9): 4125-4138.
doi: 10.1002/jgrc.20293 |
| [104] |
RAMP S R, DAVIS R E, LEONARD N E, et al, 2009. Preparing to predict: the Second Autonomous Ocean Sampling Network (AOSN-II) experiment in the Monterey Bay[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 56(3-5): 68-86.
doi: 10.1016/j.dsr2.2008.08.013 |
| [105] | ROLLO C, HEYWOOD K J, HALL R A, et al, 2020. Glider observations of the northwestern Iberian margin during an exceptional summer upwelling season[J]. Journal of Geophysical Research: Oceans, 125(8): e2019JC015804. |
| [106] |
RUCKDESCHEL G S, DAVIES K T A, ROSS T, 2020. Biophysical drivers of zooplankton variability on the scotian shelf observed using profiling electric gliders[J]. Frontiers in Marine Science, 7: 627.
doi: 10.3389/fmars.2020.00627 |
| [107] |
RUDNICK D L, DAVIS R E, ERIKSEN C C, et al, 2004. Underwater gliders for ocean research[J]. Marine Technology Society Journal, 38(2): 73-84.
doi: 10.4031/002533204787522703 |
| [108] |
RUDNICK D L, JOHNSTON T M S, SHERMAN J T, 2013. High-frequency internal waves near the Luzon Strait observed by underwater gliders[J]. Journal of Geophysical Research: Oceans, 118(2): 774-784.
doi: 10.1002/jgrc.20083 |
| [109] |
RUDNICK D L, OWENS W B, JOHNSTON T M S, et al, 2021. The equatorial current system west of the Galápagos islands during the 2014-16 El Niño as observed by underwater gliders[J]. Journal of Physical Oceanography, 51(1): 3-17.
doi: 10.1175/JPO-D-20-0064.1 |
| [110] | RUIZ S, PASCUAL A, GARAU B, et al, 2009. Mesoscale dynamics of the Balearic Front, integrating glider, ship and satellite data[J]. Journal of Marine Systems, 78 Suppl 1: S3-S16. |
| [111] | RUIZ S, RENAULT L, GARAU B, et al, 2012. Underwater glider observations and modeling of an abrupt mixing event in the upper ocean[J]. Geophysical Research Letters, 39(1): L01603. |
| [112] |
SANCHEZ-RIOS A, SHEARMAN R K, KLYMAK J, et al, 2020. Observations of cross-frontal exchange associated with submesoscale features along the North Wall of the Gulf Stream[J]. Deep Sea Research Part I: Oceanographic Research Papers, 163: 103342.
doi: 10.1016/j.dsr.2020.103342 |
| [113] |
SCHAEFFER A, ROUGHAN M, 2015. Influence of a western boundary current on shelf dynamics and upwelling from repeat glider deployments[J]. Geophysical Research Letters, 42(1): 121-128.
doi: 10.1002/2014GL062260 |
| [114] |
SCHEIFELE B, WATERMAN S, CARPENTER J R, 2021. Turbulence and mixing in the arctic ocean's Amundsen gulf[J]. Journal of Physical Oceanography, 51(1): 169-186.
doi: 10.1175/JPO-D-20-0057.1 |
| [115] | SCHOFIELD O, CHANT R, CAHILL B, et al, 2008. The decadal view of the mid-Atlantic bight from the COOLroom: is our coastal system changing?[J]. Oceanography, 21(4): 108-117. |
| [116] |
SCHÖNAU M C, RUDNICK D L, 2015. Glider observations of the North Equatorial Current in the western tropical Pacific[J]. Journal of Geophysical Research: Oceans, 120(5): 3586-3605.
doi: 10.1002/2014JC010595 |
| [117] |
SCHÖNAU M C, RUDNICK D L, 2017. Mindanao current and undercurrent: thermohaline structure and transport from repeat glider observations[J]. Journal of Physical Oceanography, 47(8): 2055-2075.
doi: 10.1175/JPO-D-16-0274.1 |
| [118] |
SCHULTZE L K P, MERCKELBACH L M, CARPENTER J R, 2020. Storm-induced turbulence alters shelf sea vertical fluxes[J]. Limnology and Oceanography Letters, 5(3): 264-270.
doi: 10.1002/lol2.10139 |
| [119] |
SEEGERS B N, BIRCH J M, MARIN III R, et al, 2015. Subsurface seeding of surface harmful algal blooms observed through the integration of autonomous gliders, moored environmental sample processors, and satellite remote sensing in southern California[J]. Limnology and Oceanography, 60(3): 754-764.
doi: 10.1002/lno.10082 |
| [120] |
SEROKA G, MILES T, XU YI, et al, 2017. Rapid shelf-wide cooling response of a stratified coastal ocean to hurricanes[J]. Journal of Geophysical Research: Oceans, 122(6): 4845-4867.
doi: 10.1002/2017JC012756 |
| [121] |
SHEEHAN P M F, BERX B, GALLEGO A, et al, 2020. Weekly variability of hydrography and transport of northwestern inflows into the northern North Sea[J]. Journal of Marine Systems, 204: 103288.
doi: 10.1016/j.jmarsys.2019.103288 |
| [122] |
SHU YEQIANG, CHEN JU, LI SHUO, et al, 2019. Field-observation for an anticyclonic mesoscale eddy consisted of twelve gliders and sixty-two expendable probes in the northern South China Sea during summer 2017[J]. Science China Earth Sciences, 62(2): 451-458.
doi: 10.1007/s11430-018-9239-0 |
| [123] | SIMONETTI P, 1998. Low-cost, endurance ocean profiler[J]. Sea Technology, 39(2): 17-21. |
| [124] |
STEFFEN J, BOURASSA M, 2020. Upper-ocean response to precipitation forcing in an ocean model hindcast of hurricane Gonzalo[J]. Journal of Physical Oceanography, 50(11): 3219-3234.
doi: 10.1175/JPO-D-19-0277.1 |
| [125] | STOMMEL H, 1989. The Slocum mission[J]. Oceanography, 2(1): 22-25. |
| [126] | SWART S, DU PLESSIS M, THOMPSON A F, et al, 2020. Submesoscale fronts in the Antarctic marginal ice zone and their response to wind forcing[J]. Geophysical Research Letters, 47(6): e2019GL086649. |
| [127] |
THOMSEN S, KANZOW T, COLAS F, et al, 2016. Do submesoscale frontal processes ventilate the oxygen minimum zone off Peru?[J]. Geophysical Research Letters, 43(15): 8133-8142.
doi: 10.1002/2016GL070548 |
| [128] | TODD R E, RUDNICK D L, DAVIS R E, 2009. Monitoring the greater San Pedro Bay region using autonomous underwater gliders during fall of 2006[J]. Journal of Geophysical Research: Oceans, 114(C6): C06001. |
| [129] | TODD R E, RUDNICK D L, MAZLOFF M R, et al, 2011. Poleward flows in the southern California Current System: glider observations and numerical simulation[J]. Journal of Geophysical Research: Oceans, 116(C2): C02026. |
| [130] |
TODD R E, GAWARKIEWICZ G G, OWENS W B, 2013. Horizontal scales of variability over the middle Atlantic bight shelf break and continental rise from finescale observations[J]. Journal of Physical Oceanography, 43(1): 222-230.
doi: 10.1175/JPO-D-12-099.1 |
| [131] |
TODD R E, OWENS W B, RUDNICK D L, 2016. Potential vorticity structure in the North Atlantic Western boundary current from underwater glider observations[J]. Journal of Physical Oceanography, 46(1): 327-348.
doi: 10.1175/JPO-D-15-0112.1 |
| [132] |
TODD R E, 2017. High-frequency internal waves and thick bottom mixed layers observed by gliders in the Gulf Stream[J]. Geophysical Research Letters, 44(12): 6316-6325.
doi: 10.1002/2017GL072580 |
| [133] | TODD R E, ASHER T G, HEIDERICH J, et al, 2018. Transient response of the gulf stream to multiple hurricanes in 2017[J]. Geophysical Research Letters, 45(19): 10509-10519. |
| [134] | TODD R E, 2020a. Equatorial circulation in the western Indian ocean during onset of the 2018 summer monsoon and links to the bay of Bengal[J]. Geophysical Research Letters, 47(10): e2020GL087215. |
| [135] | TODD R E, 2020b. Export of middle Atlantic bight shelf waters near cape Hatteras from two years of underwater glider observations[J]. Journal of Geophysical Research: Oceans, 125(4): e2019JC016006. |
| [136] |
VINCENT A G, PASCAL R W, BEATON A D, et al, 2018. Nitrate drawdown during a shelf sea spring bloom revealed using a novel microfluidic in situ chemical sensor deployed within an autonomous underwater glider[J]. Marine Chemistry, 205: 29-36.
doi: 10.1016/j.marchem.2018.07.005 |
| [137] |
WAGAWA T, KAWAGUCHI Y, IGETA Y, et al, 2020. Observations of oceanic fronts and water-mass properties in the central Japan Sea: repeated surveys from an underwater glider[J]. Journal of Marine Systems, 201: 103242.
doi: 10.1016/j.jmarsys.2019.103242 |
| [138] |
WALL C C, LEMBKE C, MANN D A, 2012. Shelf-scale mapping of sound production by fishes in the eastern Gulf of Mexico, using autonomous glider technology[J]. Marine Ecology Progress Series, 449: 55-64.
doi: 10.3354/meps09549 |
| [139] |
WANG S, LI H, WANG Y, et al, 2019. Dynamic modeling and motion analysis for a dual-buoyancy-driven full ocean depth glider[J]. Ocean Engineering, 187: 106163.
doi: 10.1016/j.oceaneng.2019.106163 |
| [140] |
WANG SHUXIN, YANG MING, NIU WENDONG, et al, 2021. Multidisciplinary design optimization of underwater glider for improving endurance[J]. Structural and Multidisciplinary Optimization, 63(6): 2835-2851.
doi: 10.1007/s00158-021-02844-z |
| [141] |
WANG YANHUI, SHEN XINRUI, YANG SHAOQIONG, et al, 2020a. Three-dimensional dynamic analysis of observed mesoscale eddy in the South China Sea based on complex network theory[J]. Europhysics Letters, 128(6): 60005.
doi: 10.1209/0295-5075/128/60005 |
| [142] |
WANG YANHUI, LUO CHENYI, YANG SHAOQIONG, et al, 2020b. Modified thermal lag correction of CTD data from underwater gliders[J]. Journal of Coastal Research, 99(S1): 137-143.
doi: 10.2112/SI99-020.1 |
| [143] |
WIJESEKERA H W, WANG D W, JAROSZ E, 2020. Dynamics of the diurnal warm layer: surface jet, high-frequency internal waves, and Mixing[J]. Journal of Physical Oceanography, 50(7): 2053-2070.
doi: 10.1175/JPO-D-19-0285.1 |
| [144] | WRIGHT-FAIRBANKS E K, MILES T N, CAI WEIJUN, et al, 2020. Autonomous observation of seasonal carbonate chemistry dynamics in the Mid-Atlantic Bight[J]. Journal of Geophysical Research: Oceans, 125(11): e2020JC016505. |
| [145] |
XU YI, CHANT R, GONG DONGLAI, et al, 2011. Seasonal variability of chlorophyll a in the Mid-Atlantic Bight[J]. Continental Shelf Research, 31(16): 1640-1650.
doi: 10.1016/j.csr.2011.05.019 |
| [146] | XU Y, CAHILL B, WILKIN J, et al, 2013. Role of wind in regulating phytoplankton blooms on the Mid-Atlantic Bight[J]. Continental Shelf Research, 63 Suppl: S26-S35. |
| [147] |
YANG CANJUN, PENG SHILIN, FAN SHUANGSHUANG, 2014. Performance and stability analysis for ZJU glider[J]. Marine Technology Society Journal, 48(3): 88-103.
doi: 10.4031/MTSJ.48.3.6 |
| [148] |
YANG MING, WANG YANHUI, WANG SHUXIN, et al, 2019. Motion parameter optimization for gliding strategy analysis of underwater gliders[J]. Ocean Engineering, 191: 106502.
doi: 10.1016/j.oceaneng.2019.106502 |
| [149] |
YU LUSHA, BOSSE A, FER I, et al, 2017. The Lofoten Basin eddy: three years of evolution as observed by Seagliders[J]. Journal of Geophysical Research: Oceans, 122(8): 6814-6834.
doi: 10.1002/2017JC012982 |
| [1] | 马梦真, 李芊, 吴正超, 陈寅超, 俞建成. 南海北部最小含氧带水下滑翔机观测结果初步分析*[J]. 热带海洋学报, 2022, 41(1): 131-142. |
| [2] | 蔡逸男, 杜岩, 陈泽生. 四种全球大洋水汽数据产品的比较分析*[J]. 热带海洋学报, 2021, 40(2): 17-26. |
| [3] | 曹文熙, 孙兆华, 李彩, 邹国旺. 水质监测浮标及其传感器的防污染措施[J]. 热带海洋学报, 2018, 37(5): 7-12. |
| [4] | 秦华伟, 陶卓, 李怀明, 岳羲和, 蔡真, 陈升, 周红伟, 叶瑛. 热液喷口探测化学传感器的研制及应用*[J]. 热带海洋学报, 2018, 37(3): 86-92. |
| [5] | 董贤信, 蒋凯, 陈杭, 叶树明. 深海极端环境模拟装置设计*[J]. 热带海洋学报, 2014, 33(2): 101-108. |
| [6] | 章雪挺,唐勇,刘敬彪,黄孔耀 . 深海近底三分量磁力仪设计[J]. 热带海洋学报, 2009, 28(4): 49-53. |
|
||