
Journal of Tropical Oceanography >
Design of Wave Glider optimal wing parameters suitable for the South China Sea
Copy editor: YIN Bo
Received date: 2020-05-23
Request revised date: 2020-08-29
Online published: 2020-09-12
Supported by
National Nature Science Foundation of China(41875061)
National Nature Science Foundation of China(41075045)
National Nature Science Foundation of China(41775165)
National Nature Science Foundation of China(51609254)
Nature Science Foundation of Jiangsu(BK20161464)
Nature Science Foundation of Hunan(2020JJ4661)
National University of Defense Technology(ZK18-03-48)
Copyright
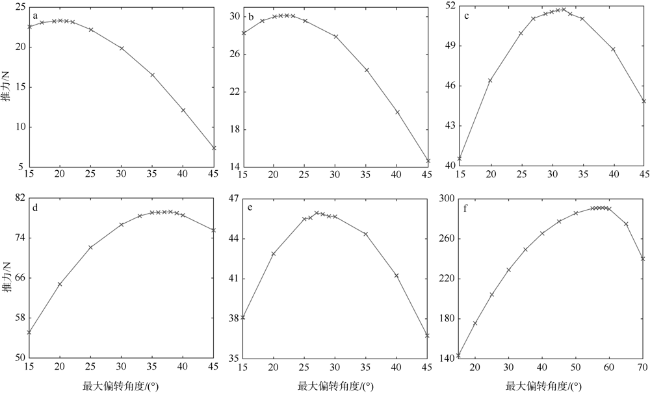
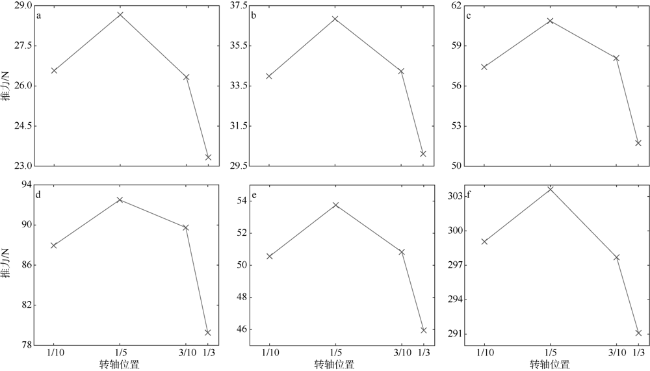
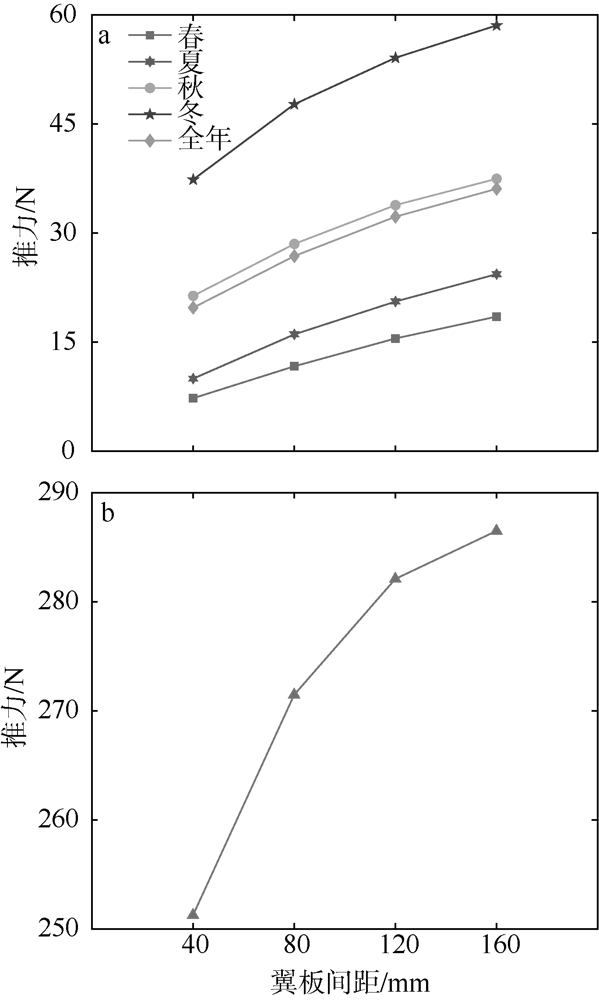
In view of different wave height and period in the South China Sea, the design of Wave Glider wing parameters is studied to obtain greater thrust. Based on the reanalysis data set of ERA5, we provide statistics on the wave height and wave period of different seasons and induced by one typhoon in the South China Sea. In addition, the software FLUENT is used to study the influence of the maximum limit angle, the position of rotating axis and the spacing of the wings. The simulation results show that the larger the wave height, the larger the maximum limit angle should be in order to ensure that the wings can get more thrust. Under the conditions of wave height and period in the South China Sea, it is better to select 1/5 of the front of the wing as the position of rotating axis. Increasing the spacing of the wings properly can improve the thrust. By simulating the flapping wings, the thrust generated by the wings under different parameters is obtained, which provides a reference for the design of the wings.
WU Shiqi , HONG Mei , CHEN Xi , MAO Kefeng , LIU Kefeng . Design of Wave Glider optimal wing parameters suitable for the South China Sea[J]. Journal of Tropical Oceanography, 2021 , 40(2) : 112 -119 . DOI: 10.11978/2020054
图1 波浪滑翔机(Manley et al, 2010b)Fig. 1 The view of Wave Glider from below |
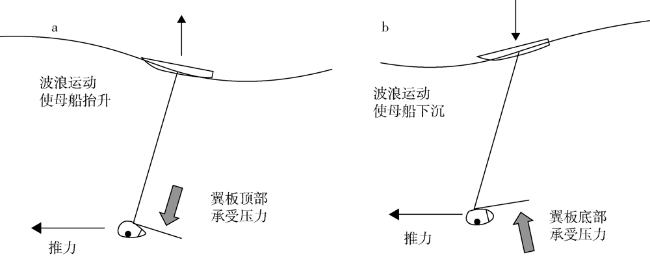
图2 波浪滑翔机工作原理示意图(Manley et al, 2010a)a. 上升状态; b. 下降状态 Fig. 2 The operational principles of Wave Glider (a) on the rise, (b) on the fall |
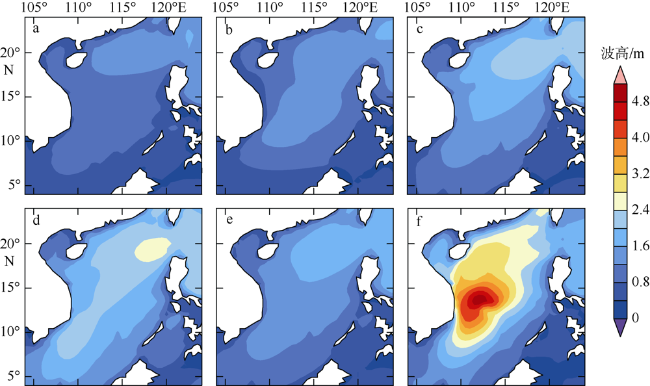
图3 南海有效波高分布a. 春季; b. 夏季; c. 秋季; d. 冬季; e. 全年; f. 台风最强盛时刻 Fig. 3 Significant wave height distribution in the South China Sea (a) spring, (b) summer, (c) autumn, (d) winter, (e) annual, and (f) during typhoon |
表1 南海海域波高和波周期数值Tab. 1 Wave height and period in the South China Sea |
| 波高/m | 波周期/s | |
|---|---|---|
| 春季 | 0.96 | 5.39 |
| 夏季 | 1.04 | 5.21 |
| 秋季 | 1.44 | 6.32 |
| 冬季 | 1.79 | 6.50 |
| 全年 | 1.31 | 5.85 |
| 台风风眼附近 | 5.15 | 8.61 |
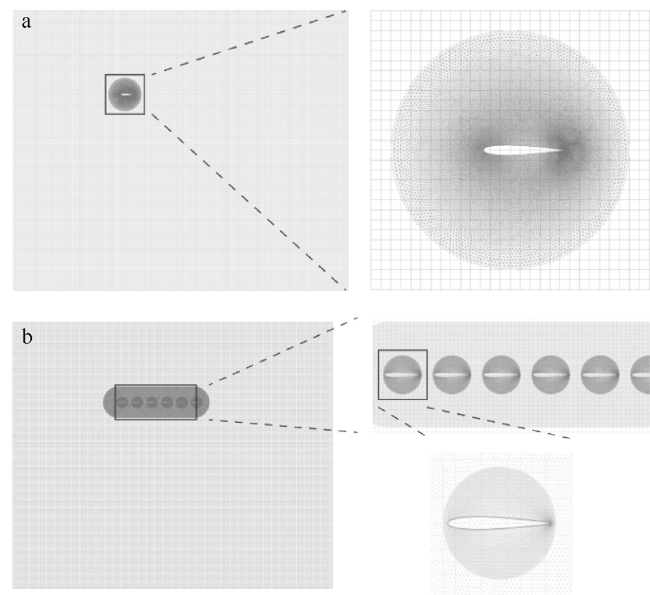
表2 网格尺寸验证Tab. 2 Mesh size validation |
| 网格编号 | 总网格数/个 | 背景网格数量/个 | 重叠网格数量/个 | 平均推力/N |
|---|---|---|---|---|
| A1 | 49630 | 21280 | 28350 | 40.3 |
| A2 | 79053 | 33400 | 45653 | 42.7 |
| A3 | 114788 | 48000 | 66788 | 43.5 |
| A4 | 152815 | 68068 | 84747 | 43.5 |
| [1] |
胡合文, 2015. 波浪滑翔机的水动力分析[D]. 哈尔滨: 哈尔滨工程大学.
|
| [2] |
胡滕艳, 孙秀军, 王兵振, 等, 2018. 利用Fluent仿真分析波浪滑翔器的水动力性能[J]. 海洋技术学报, 37(3):8-12.
|
| [3] |
贾立娟, 2014. 波浪动力滑翔机双体结构工作机理与动力学行为研究[D]. 天津: 国家海洋技术中心.
|
| [4] |
李灿, 2018. 波浪滑翔器动力学分析及性能优化[D]. 天津: 天津工业大学(in Chinese).
|
| [5] |
吕元博, 田新亮, 李欣, 等, 2018. NACA 0012摆动水翼水动力特性的二维数值模拟[J]. 中国舰船研究, 13(2):7-15.
|
| [6] |
桑宏强, 李灿, 孙秀军, 2018. 波浪滑翔器纵向速度与波浪参数定量分析[J]. 水下无人系统学报, 26(1):16-22.
|
| [7] |
孙秀军, 王雷, 桑宏强, 2019. “黑珍珠”波浪滑翔器南海台风观测应用[J]. 水下无人系统学报, 27(5):562-569.
|
| [8] |
严日华, 2017. 波浪滑翔器潜体水动力性能分析[D]. 哈尔滨: 哈尔滨工程大学.
|
| [9] |
杨燕, 张森, 史健, 等, 2014. 波浪动力滑翔机海洋环境监测系统[J]. 海洋技术学报, 33(1):109-114.
|
| [10] |
张森, 史健, 张选明, 等, 2014. 波浪动力滑翔机岸基监控系统[J]. 海洋技术学报, 33(3):119-124.
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}