
Journal of Tropical Oceanography >
Retrieval of island shallow water depth from the GaoFen-1 multi-spectral imagery
Received date: 2016-06-27
Request revised date: 2016-11-04
Online published: 2017-04-06
Supported by
High Resolution Earth Observation System Special Project (41-Y30B12-9001-14/16)
Promote Cross-Taiwan Strait Union Science and Technology Cooperation Fund (U1405234)
Scientific Research Foundation of Third Institute of Oceanography, State Oceanic Administration (2014017)
Copyright
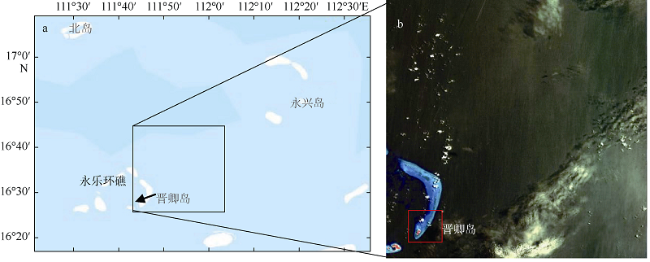
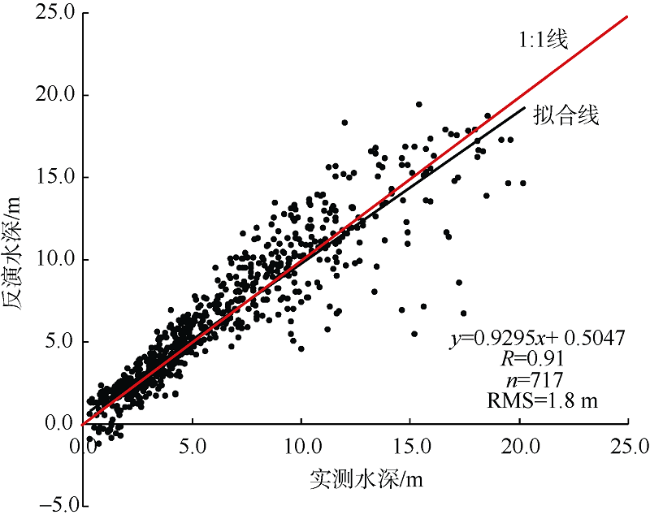
It is of great significance to fully exploit the oceanic application potential of the GaoFen-1 data, which is the first domestic high-resolution satellite of Earth observation in China. In this study, a GaoFen-1 multi-spectral image is used to retrieve the island shallow water depth of Jinqing Island in Xisha sea area by adopting the dual-band linear model and log-ratio model, after serials of image processing including image geometric correction, atmospheric correction and sun-glint correction. The accuracy of the two models is evaluated by using actual water depth data. Meanwhile, possible influence factors of retrieval accuracy of island shallow water depth from satellite data are discussed. It is shown that the result from the dual-linear model is obviously better than that from the log-ratio model, and the dual-band linear model is more suitable for the retrieving shallow water depth of Jinqing Island. For water depth less than 20 m, the overall root mean square (RMS) error is 1.8 m with RMS error of 1.14 m within 5 m, which reaches the level of accuracy of water depth inversion by satellite remote sensing.
Key words: remote sensing; GaoFen-1; high-resolution satellite; island; water depth inversion
CHEN Benqing , YANG Yanming , LUO Kai . Retrieval of island shallow water depth from the GaoFen-1 multi-spectral imagery[J]. Journal of Tropical Oceanography, 2017 , 36(2) : 70 -78 . DOI: 10.11978/2016064
Fig. 1 Location of Jinqing Island (a) and acquired Gaofen-1 satellite image (b). The red box in (b) denotes the study area图1 西沙晋卿岛位置分布(a)及获取的高分一号卫星数据(b)(红框为研究区域) |
Tab. 1 Related parameters of Gaofen-1 satellite image表1 高分一号卫星图像相关参数 |
| 传感器 | 波长/mm | 分辨率/m | 幅宽/km | 自主定位精度 |
|---|---|---|---|---|
| 全色 | 0.45~0.90 | 2.0 | 60 | 优于50m |
| 多光谱 | 蓝波段: 0.45~0.52 绿波段: 0.52~0.59 红波段: 0.63~0.69 近红外波段: 0.77~0.89 | 8.0 | 60 |
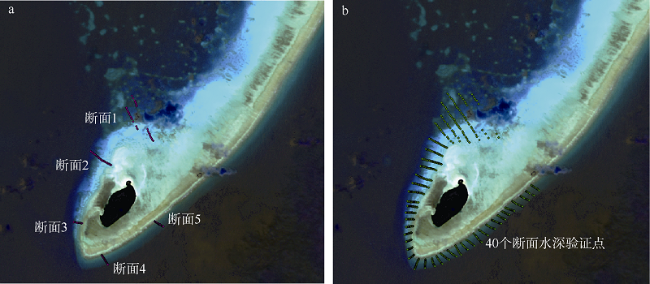
Fig. 2 Reference points (a) and accuracy validation points (b) of water depth图2 水深参考点(a)与验证点分布(b) |

Fig. 3 Location distribution of two objects for evaluating atmospheric effect of DOS3图3 用于DOS3大气校正效果比较的两种地物样区的位置分布图 |
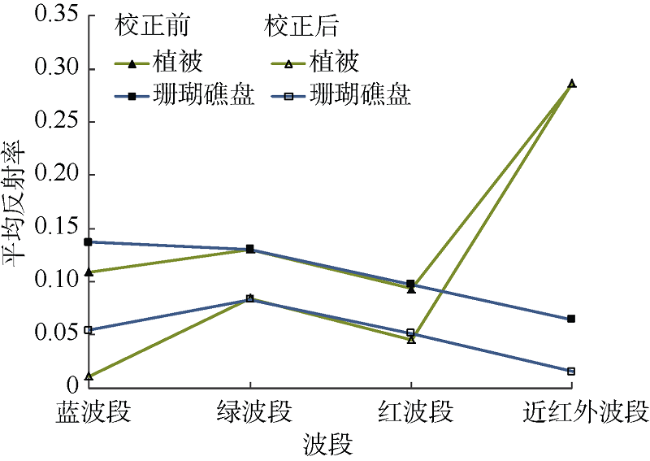
Fig. 4 Reflectance comparison of two different objects before and after atmospheric correction图4 大气校正前后两种不同地物反射率比较 |
Tab. 2 Radiance calibration coefficients and solar exoatmospheric irradiances constant of Gaofen-1 satellite表2 高分一号图像各波段的辐射定标系数和大气层外波段太阳辐照度 |
| 波段 | 增益值/ (W·m-2·Sr-1·µm-1) | 偏移值/ (W·m-2·Sr-1·µm-1) | E0 / (W·m-2) |
|---|---|---|---|
| 蓝波段 | 0.2247 | 0.0 | 1944.98 |
| 绿波段 | 0.1892 | 0.0 | 1854.42 |
| 红波段 | 0.1889 | 0.0 | 1542.63 |
| 近红外波段 | 0.1939 | 0.0 | 1080.81 |
注: 高分一号定标系数采用2014年外场绝对辐射定标系数 |
Tab. 3 Atmospheric parameters after iteration and stability of DOS3 algorithm表3 DOS3算法经过迭代稳定后的各大气参数 |
| 蓝波段 | 绿波段 | 红波段 | 近红外波段 | |
|---|---|---|---|---|
| 迭代次数 | 3 | 3 | 3 | 2 |
| Tv | 0.59 | 0.73 | 0.78 | 0.80 |
| Tz | 0.58 | 0.72 | 0.77 | 0.79 |
| Ed/(W·m-2·µm-1) | 774.89 | 484.85 | 333.45 | 210.36 |
| 光学厚度 | 0.54 | 0.32 | 0.25 | 0.23 |
| Lp/(W·m-2·µm-1) | 61.76 | 38.66 | 26.54 | 16.81 |

Fig. 5 Graphical interpretation of sun glint correction method of Heldley et al (2005)图5 Hedley等(2005)的算法示意图 |
Fig. 6 Image and its corresponding magnification before and after sun glint correction (a, b: before correction; c, d: after correction)图6 耀斑校正前后图像及其对应的局部放大图(a、b: 校正前; c、d: 校正后) |


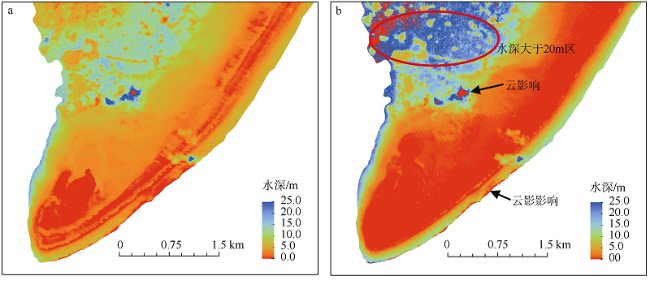
Fig. 7 Estimated water depth map from the log-ratio model (a) and dual-band linear model by using Gaofen-1 image图7 对数比值(a)和双波段线性(b)模型高分一号图像水深反演结果图 |
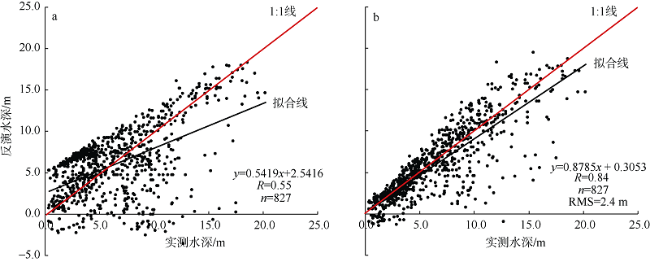
Fig. 8 Scatter plots of retrieved water depths from the log-ratio model (a) and dual-band linear model (b) versus actual water depths图8 对数比值(a)和双波段线性模型(b)水深反演结果验证散点图 |
Fig. 9 Graphical display of the outlier points图9 误差较大验证点分布区域 |
Fig. 10 Same as |
Tab. 4 Error estimation of different water depth ranges表4 不同深度水深反演误差分析 |
| 水深范围/m | 0~5 | 5~10 | 10~15 | 15~20 |
|---|---|---|---|---|
| 验证点数/个 | 349 | 233 | 113 | 22 |
| 均方根误差(RMS)/m | 1.14 | 1.89 | 2.67 | 3.33 |

 ,
,  , 当底质反射率均一时, 上式满足线性关系, 其斜率即为该断面的g值。利用实测水深数据z和图像反射率数据X, 统计获得了3个剖面的g值。结果表明3个剖面的g值并不一致, 越靠近礁盘区域, 其g值越大。因此g值一致性假设可能也是影响晋卿岛周边浅海水深反演精度的另外一个重要因素。
, 当底质反射率均一时, 上式满足线性关系, 其斜率即为该断面的g值。利用实测水深数据z和图像反射率数据X, 统计获得了3个剖面的g值。结果表明3个剖面的g值并不一致, 越靠近礁盘区域, 其g值越大。因此g值一致性假设可能也是影响晋卿岛周边浅海水深反演精度的另外一个重要因素。The authors have declared that no competing interests exist.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}