
Journal of Tropical Oceanography >
Dual-azimuth seismic survey technology and application using dual vessels
Received date: 2017-03-27
Request revised date: 2017-04-29
Online published: 2018-02-02
Supported by
Natural Marine Geology Security Engineering (GZH201200508)
Copyright
In Dongsha slope of the South China Sea, shallow fracture and reefs are numerous. Shallow Cenozoic is composed of carbonate rocks. The internal structure of deep Mesozoic is complex, with a lot of fracture. The conventional single vessel narrow azimuth seismic section shows poor reflection quality in deep sea. Dual vessels can be used to design flexible observation geometry, such as dual-azimuth seismic exploration. For the same reflection point lighting, this method of dual-azimuth seismic exploration is better than the narrow azimuth detection beneath the high acoustic velocity layer and the steep dip angle layer. Through key technology research and development, the dual-azimuth seismic acquisition was carried out by using single source and two streamers on both sides. We successfully implemented the experiment for the deep target seismic exploration in the South China Sea.
YANG Shuji , WEI Chenglong , WU Zhongliang , LIU Xielai , YANG Ce , WANG Cong . Dual-azimuth seismic survey technology and application using dual vessels[J]. Journal of Tropical Oceanography, 2018 , 37(1) : 98 -104 . DOI: 10.11978/2017033
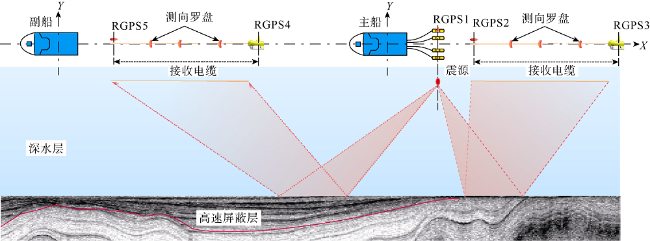
Fig. 1 The general view of dual-vessel dual-azimuth seismic acquisition图1 双船双方位角地震采集示意图 |
Fig. 2 Terrain features along the section in DongSha slope platform of the South China Sea图2 东沙上陆坡台地区地形特征剖面图 |
Tab. 1 Acquisition parameters for dual-vessel dual- azimuth seismic survey表1 双船双方位角地震采集参数表 |
| 采集参数 | “奋斗四号”船 | “探宝号”船 |
|---|---|---|
| 两船相对位置 | 副船(前) | 主船(后) |
| 两船电缆道最小距离/m | 2475 | 2475* |
| 船偏线范围/m | ±25 | ±25* |
| 震源容量/m3 | 无 | 0.105 |
| 气枪压力/MPa | 13.8 | 13.8* |
| 放炮间隔/m | 37.5 | 37.5* |
| 震源深度/m | 无 | 等效深度8.5m |
| 激发延迟/ms | 无 | 1&4子阵列延迟2ms |
| 电缆道数 | 360 | 480 |
| 道间距/m | 6.25 | 12.5 |
| 电缆深度/m | 16 | 16 |
| 最小偏移距/m | 2250 | 225 |
| 覆盖次数 | 30 | 80 |
注: 表中*代表副船与主船的参数相同 |
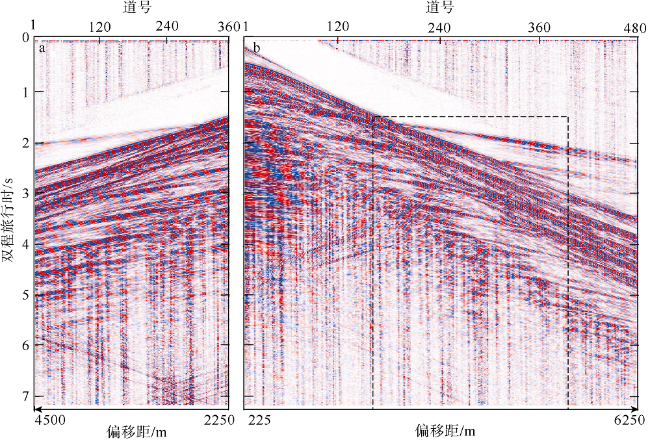
Fig. 3 Slave (a) and master vessel (b) common shot records in the same reflection zone图3 副船(a)与主船(b)在相同反射区域的炮集记录 |
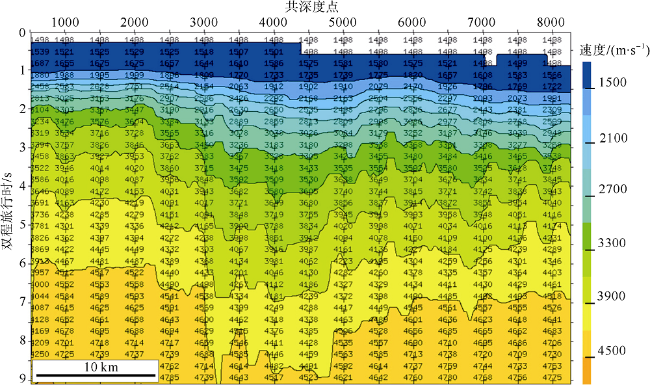
Fig. 4 Stacking velocity field obtained by using constant and variable velocity scans图4 利用常速和变速扫描微调方法获得的叠加速度场 |
Fig. 5 Slave (a) and master vessel (b) Stack section by using stacking velocity field图5 利用叠加速度场获得的副船(a)及主船(b)叠加剖面 |
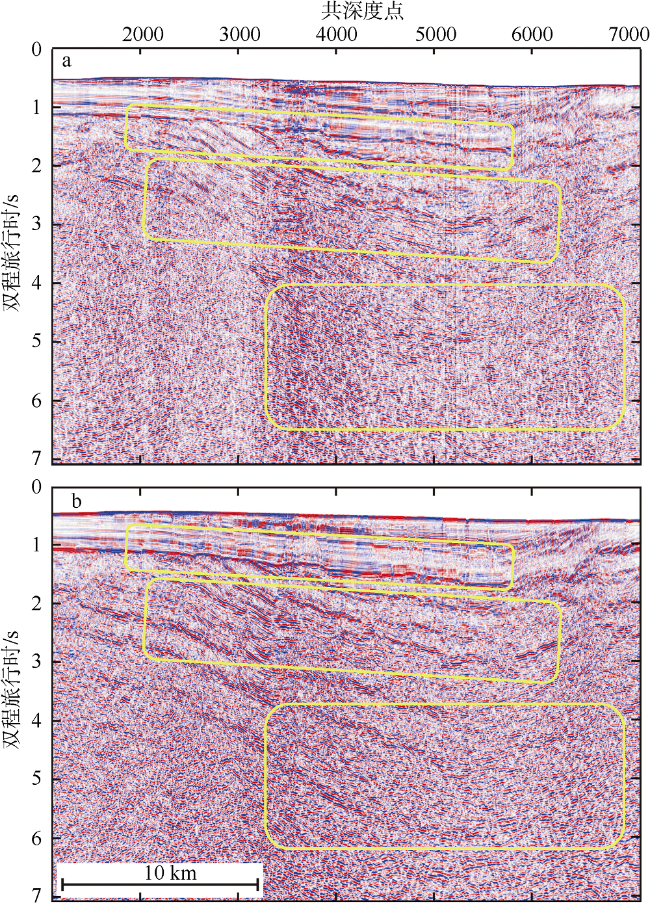
Fig. 6 Prestack time migration section for single vessel (a) and dual-vessel dual-azimuth (b) acquisition data图6 单船(a)与双船双方位角采集(b)的叠前时间偏移剖面 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}